1. 计算机系统概述 #
历史: 电子管-晶体管-(小/大规模)集成电路
高频考点:
1.1 计算机系统层次结构 #
1.1.1 计算机系统的基本组成 #
硬件 + 软件
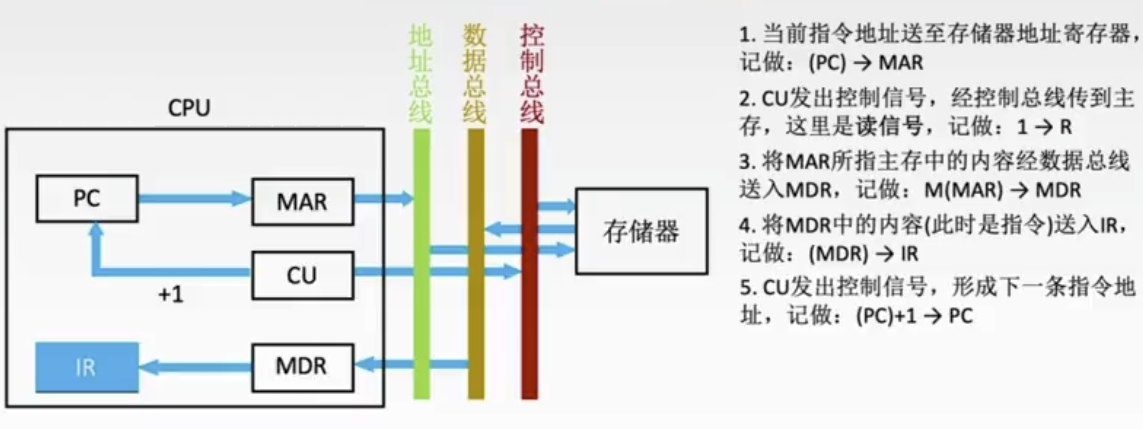
1.1.2 计算机硬件基本组成 - 冯诺依曼结构 #
- 组成: 运算器-存储器-控制器-输入-输出
- 存储器
- MAR - Memory Adress Register 地址寄存器
- MDR 数据寄存器
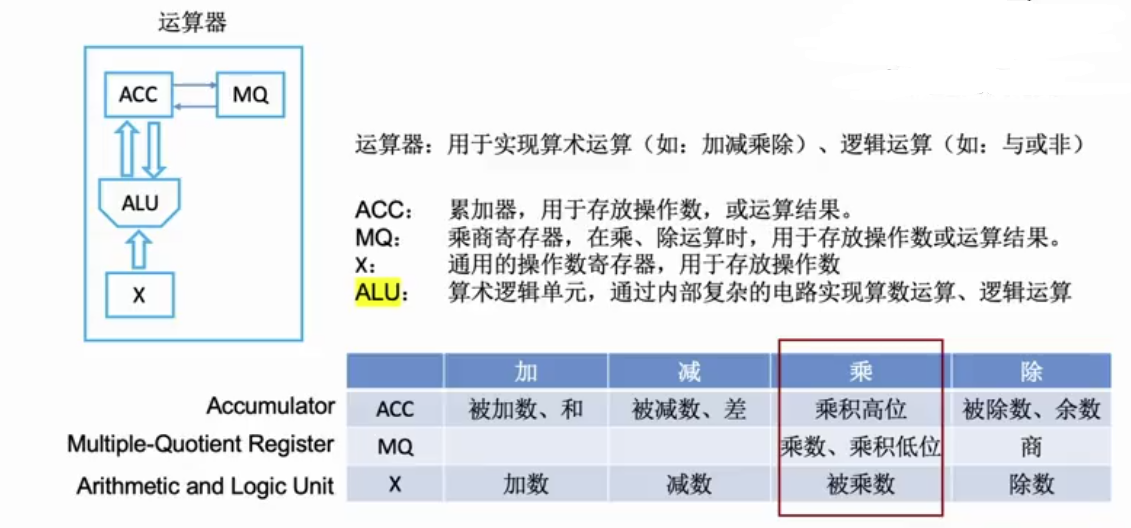
- 运算器
- ALU 算数逻辑单元
- 寄存器
- ACC 累加器
- MQ 乘商寄存器
- X 操作数寄存器
- IX 变址寄存器
- BR 基址寄存器
- PSW 程序状态寄存器 - 标志寄存器
- 控制器
- PC 程序计数器 - 存放当前要执行指令的地址(通往 MAR)
- IR 指令寄存器 - 存放当前的指令(通往 MDR)
- CU 控制单元
- 存储器
- 指令和数据以同等地位存储在存储器中, 可按地址访问
- 指令和数据均用二进制代码表示
- 指令由操作码和地址码组成; 操作码指出操作类型, 地址码给出操作数的地址
1.1.3 计算机软件和硬件的关系 #
- (系统/应用)软件
- 语言
- 机器语言 - 机器直接执行的二进制代码
- 转换为机器语言的过程成为翻译, 分为两种
- 编译 - 翻译形成新的机器语言文件再执行
- 解释 - 先执行, 执行一句, 翻译一句
- 转换为机器语言的过程成为翻译, 分为两种
- 汇编语言 - 简单英文助记符代替二进制的指令代码, 需要经过汇编转换为机器语言
- 高级语言 - 如 C 语言, 需要经过编译转为汇编语言,再经过汇编转换为机器语言
- 机器语言 - 机器直接执行的二进制代码
1.1.4 计算机系统的工作原理 #
1.2 性能指标 #
- 字长
- 机器字长 - 计算机能直接处理的二进制数据的位数
- 如 ALU、通用寄存器位数与机器字长相等
- 指令字长 - 一个指令字中包含的二进制代码的位数
- 一般取存储字长的整数倍; 以 2 倍为例, 取指周期为机器周期的 2 倍
- 存储字长 - 一个存储单元存储的二进制代码的长度
- 机器字长 - 计算机能直接处理的二进制数据的位数
- 吞吐量 - 系统单位时间内处理请求的数量
- 时钟周期
- 主频 - CPU时钟频率, 时钟周期的倒数(即一秒多少个周期)
- CPI 每条指令所需时钟周期数(与指令集, 系统结构都有关, 一般取平均)
- IPC 即 CPI 的倒数
- CPU 执行时间 = 指令数 * CPI * 时钟周期
- IPS 每秒执行多少条指令, IPS = 主频 / CPI (MIPS 每秒xx百万指令)
- (M/G/T/P)FLOPS 每秒xx(百万/十亿/万亿..)次浮点运算
2. 数据的表示和运算(重点) #
高频考点:
- 定点数编码
- 浮点数IEEE754标准表示
- 符号扩展, C语言类型转换, 数据的存储与排列
- 定点数的移位运算
- 溢出判断
- 补码加减法运算
2.1 数制与编码 #
2.1.1 进位计数制及其相互转换 #
数制之间的转换(重点)
- 整数部分除基取余
- 小数部分乘基取整
2.1.2 定点数的编码表示 #
真值: 带符号的自然数
机器数: 自然数 “01” 化后的表示, 分为两类
c 语言部分变量类型代表的长度:
- short - 16位
- int - 32 位(属于带符号数, 计算机内除浮点数外带符号数都用补码表示)
定点数(小数点的位置固定)的表示:
- 无符号数
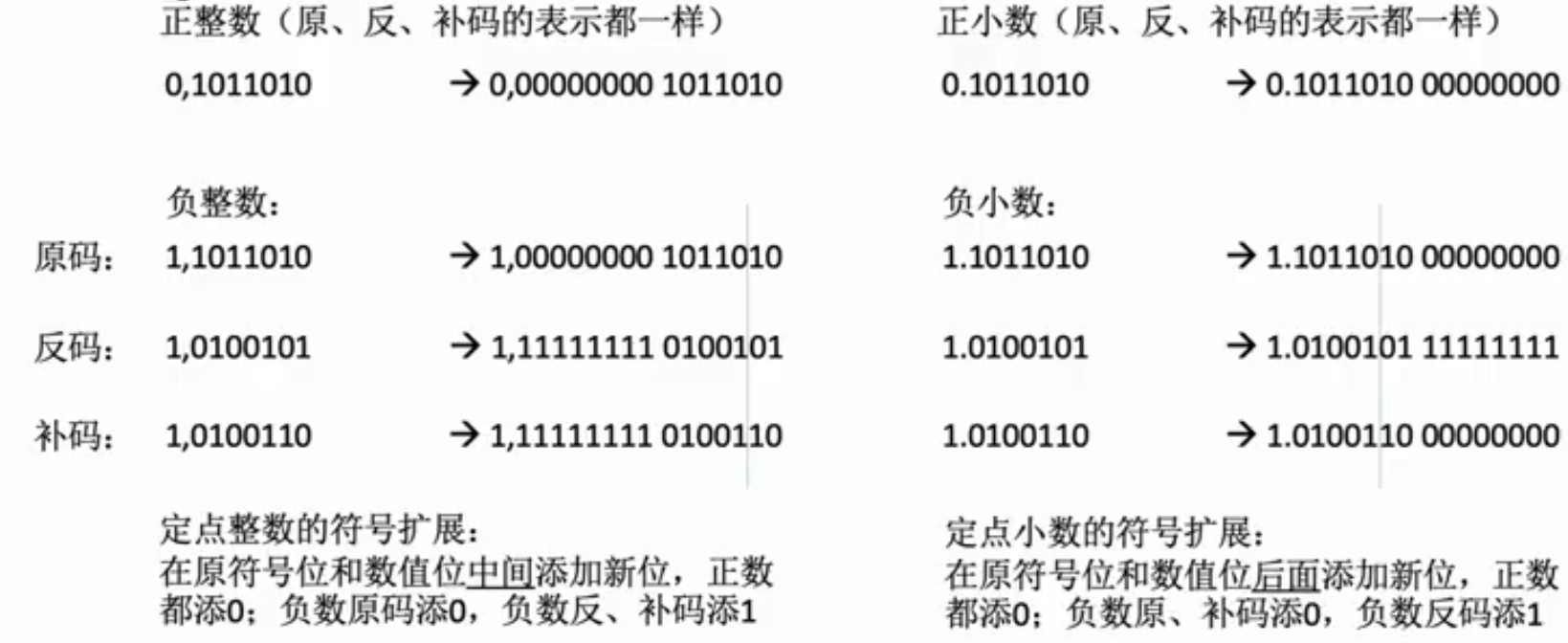
- 有符号数 - 符号位, 0 正 1 负, 有四种编码方式(正数均等同于原码):
- 原码: 常规最高位位符号位, 但不利于加减法操作(例如减法要先比较大小再大减小)
- 反码: 原码符号位不变, 其他位取反
- 补码: 反码 + 1 (模 - a的绝对值 = a的补码)
- 使用补码可以将建房转变为等价的加法
- 此时符号位也要参与运算(数论推导), 超过八位会保留低位
- 从而 ALU 只需实现加法
- 移码: 补码的基础上将符号位取反(只能用于表示整数)
定点数的移位运算:
- 算数移位(符号位不动,正数均补0, 以下讨论负数):
- 原码: 右移, 高位补 0, 低位舍弃, 左移相反; 若舍弃位不为 0, 则丢失精度
- 反码: 右移, 高位补 1, 低位舍弃
- 补码: 右移, 高位补 0, 低位舍弃(补码转反码找最低位的0)
- 带符号数默认补码
- 真值直接转补码技巧
- 例如 -8190 补码 = $-2^{13} + 2^1$
- 即补码为
10 0000 0000 0010 - 负数符号扩展到 16 位
1110 0000 0000 0010
- 逻辑移位 - 无符号数的算数移位, 即直接从最高位开始移位
- 循环移位
- 不带进位位 - 移出的位放入移入的位
- 带进位位 - 溢出的位放到进位位, 原进位位补上空缺
例题1: 若 short 型变量 x = - 8190 , 则 x 的机器数是 E002H
2.2 运算方法和运算电路 #
2.2.1 基本运算部件 #
2.2.2 加/减运算(高频) #
原码:
- 原码的加法运算(若直接加有符号位存在会出问题),根据被加数和加数正负分:
- 正 + 正, 绝对值做加法, 符号为正, 可能会(向上)溢出
- 负 + 负, 绝对值做加法, 符号为负, 可能会(向下)溢出
- 正 + 负 | 负 + 正, 绝对值大减绝对值小, 符号为同绝对值大数
- 原码的减法操作, 转为加法(取反加一)即可
补码: 带符号位直接加
溢出问题:
- 双符号位, 通过两位异或运算判断低位是否发生溢出(溢出发生时, 可以右移一位挽救)
- 符号扩展(如8位扩16位)
溢出检测:
- 一位符号位
- 双符号位
- 一位符号位根据最高数位的进位
例题(Todo):
例题
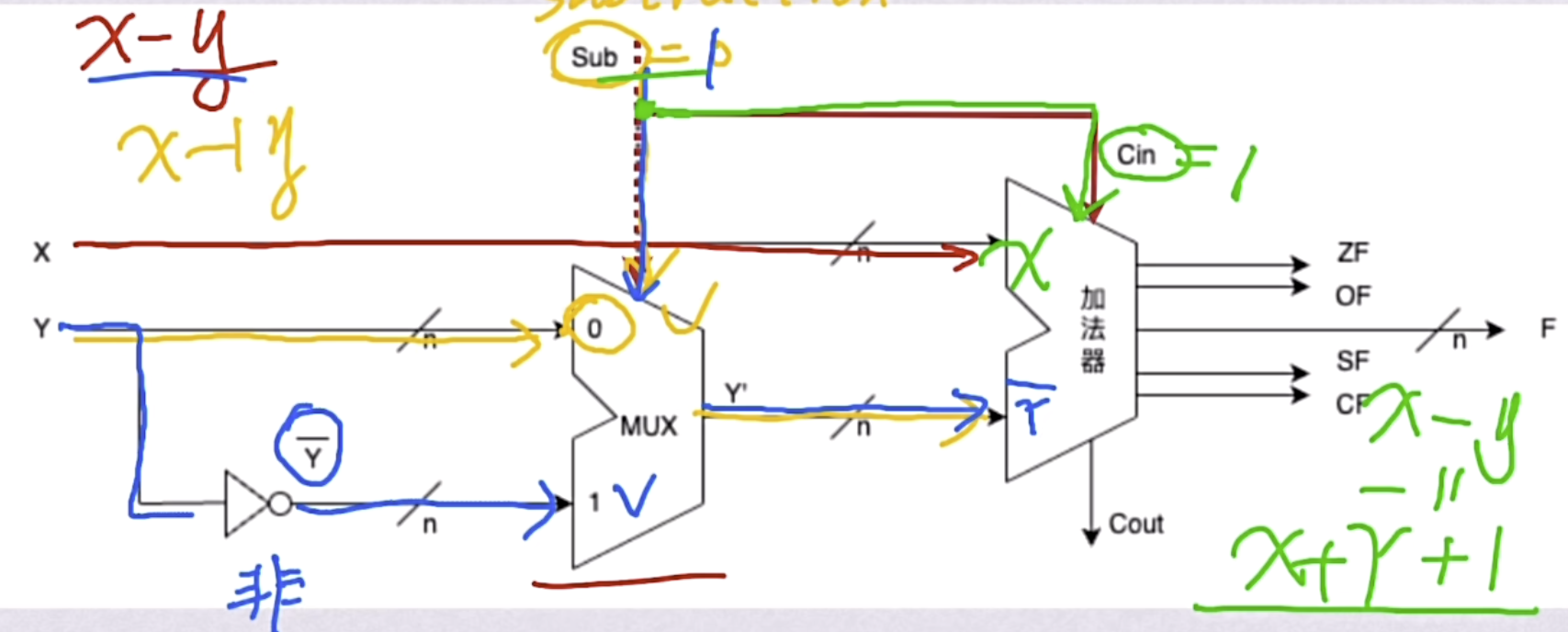
加法器设计 #
$C_n$ 为最高位的进位
$C_{n-1}$ 为次高位的进位
$C_{out} = C_n$
$C_{in}$ 等同于 Sub (减法, 代表要取反加一)信号
ZF - Zero Flag, 结果为 0, ZF = 1
OF - Overflow Flag, 溢出标志 = $C_n \otimes C_{n-1}$
SF - Sign Flag, 结果最高位(双符号位时取最高位)
CF - Carry Flag, 借位标志 = $Sub \otimes C_{out}$
2.2.3 乘/除运算 #
乘法参考
除法参考辗转相除法
原码的一位乘法:
- 符号位单独异或运算, 数值取绝对值乘法计算
- n次"加法(二进制下, 最高位1加被乘数, 最低位0则加0)+逻辑右移(高位补0)"
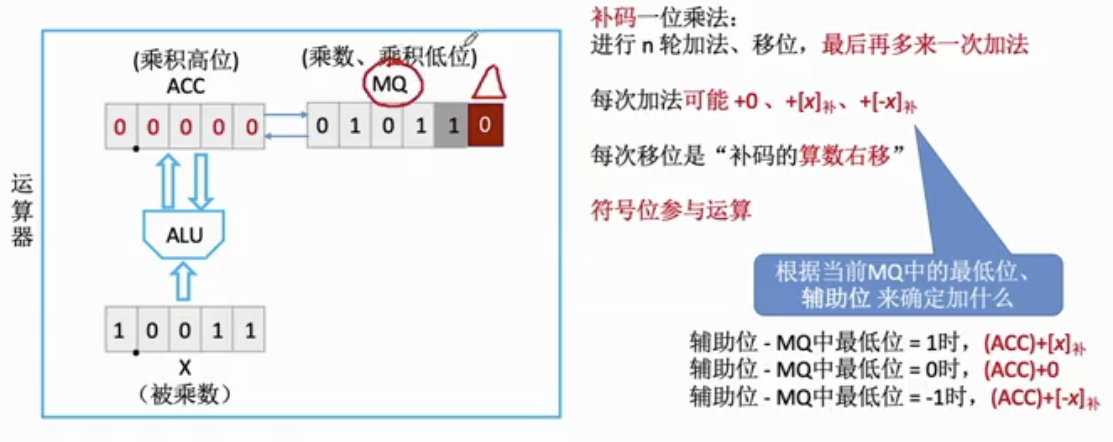
补码的一位乘法(Booth算法):
- 符号位参与运算,新增一个标志位, 乘数右移y后移入
- 进行 n 论加法算数右移, 最后按照规则再多来一次加法
原码除法(TODO):
- 恢复余数法
- 符号位单独异或运算, 数值取绝对值除法计算
- n 次 “减法+逻辑左移(低位补0)”, mo
- 加减交替法(恢复余数法的优化)
- 符号位单独异或运算, 数值取绝对值除法计算
-
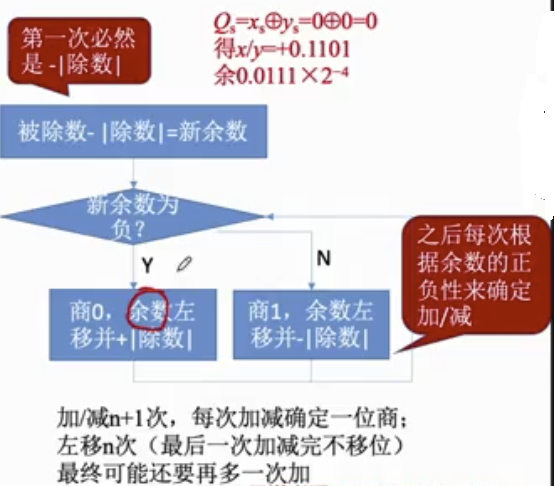
补码除法: 加减交替法(TODO)
- 符号位参与运算, 被除数/余数, 除数采用双符号位
2.3 整数的表示和运算 #
按考纲组织的无符号/带符号整数的表示和运算上述已经介绍过
2.3.1 无符号整数的表示和运算 #
2.3.2 带符号整数的表示和运算 #
2.4 浮点数的表示和运算 #
2.4.1 浮点数的表示 #
$浮点数 = r^{阶码} \times 尾数$, 其中 r 位进制数:
- 阶码(阶符(号) + 阶码数值), 常用补码或移码, 反映大小
- 尾数(数符(号) + 尾数数值), 常用补码或原码, 反映精度
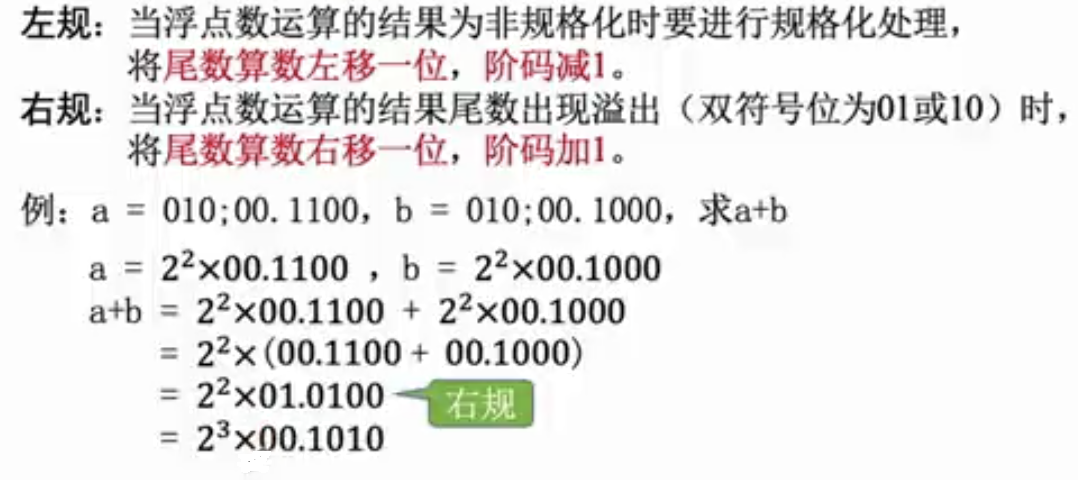
由于精度不一, 遂规格化(类似科学计数法最高位不能为 0):
- 左规 - 尾数左移一位, 阶码减 1
- 右规 - 尾数右移一位, 阶码加 1
规格化后特点:
- 原码
- 正数 - 0.1xxx
- 负数 - 1.1xxx
- 补码(补码负数: 算数左移, 低位补 0; 算数右移, 高位补 1)
- 正数(同原码) - 0.1xxx
- 负数 - 1.0xxx, 最大值 1.01..1, 最小值 1.00..0
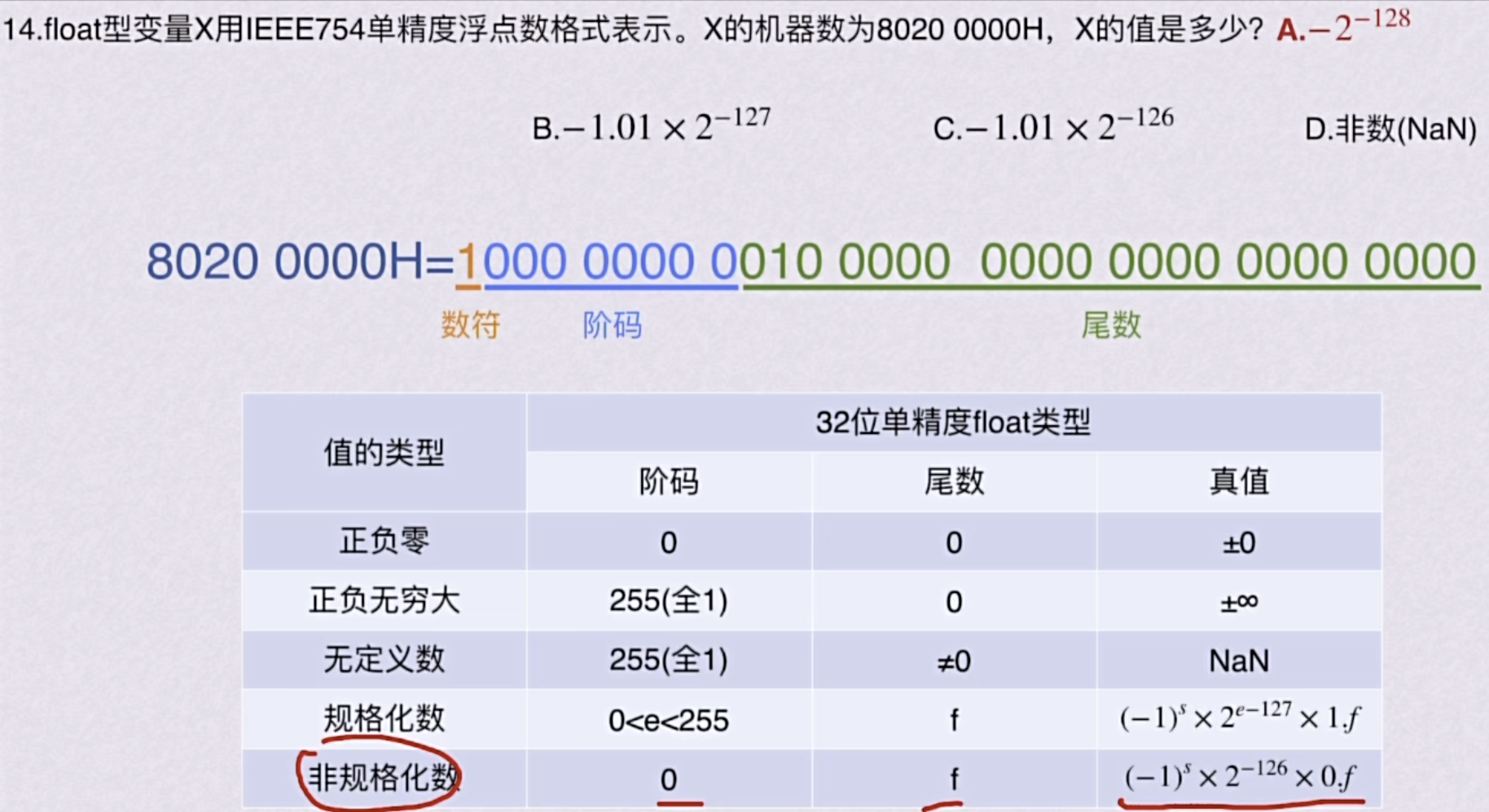
IEEE-754 #
IEEE-754 单精度浮点数格式标准:
- 1 位数符(正负)
- 8 位阶码(移码-补码基础上符号位取反)
- 23 位尾数(补码)
非规格例题:
2.4.2 浮点数的加/减运算 #
- 对阶 - 对齐为 2 的 n 次方, 小阶向大阶靠齐
- 尾数相减
- 规格化
- 舍入(若规定保留x位有效尾数, 可以直接砍掉或四舍五入)
- 判溢出(阶码进位溢出; 尾数溢出可以通过规格化补救)
真题例题 #
(2001真题)设浮点数的阶码和尾数均采用补码表示,且位数分别为5位和7位(均含2位符号位). 若有两个数$X = 2 ^ 7 \times \frac{29}{32} , Y = 2 ^ 5 \times \frac{5}{8}$ 则用浮点加法计算X+Y的最终结果是?
解(以下用``;`分隔和尾数):
- 规格化
- X的阶码为 7, Y 的阶码为 5, 小阶向大阶靠齐
- 即 Y 的阶码加 2, 尾数右移 2 位
- Y 的尾数: $\frac{5}{8} = \frac{1}{2^1} + \frac{1}{2^3}$, 用7位补码(正数同原码)其中2位符号位表示:
- 00.10100
- 右移两位为: 00.00101
- X 的尾数: 00.11101
- 尾数相加
00.10100+00.11101=01.00010- 溢出了一位到符号位, 所以需要右规
- 规格化
- 尾数相加溢出一位, 右规阶码加 1
- 原 X 阶码5位补码表示:
00111 - 加 1 后
01000
- 原 X 阶码5位补码表示:
- 尾数右移一位:
00.10001 - 即结果:
01000;00.11001
- 尾数相加溢出一位, 右规阶码加 1
- 判溢出, 阶码符号位为
01, 因此结果溢出了(如果左归则尾数溢出)
3. 存储系统(重点) #
3.1 存储器的分类 #
按存储介质分类:
- 半导体(内存)
- 磁性材料(机械硬盘)
- 光介质(光盘)
按存储方式分类:
- RAM - 随机存取存储器(读写时间位置无关, 如内存)
- SAM - 顺序存取存储器(读写时间与位置相关, 如磁带)
- DAM - 直接存取存储器(位置部分相关, 如磁盘)
按信息的可更改性:
- 读写存储器
- 只读存储器 - ROM(如 BIOS CD_ROM)
按照信息的可保存性:
- 易失性存储器(断电丢失)
- 非易失性存储器(断电保存)
存储器的性能指标:
- 存储容量 = 存储字数 x 位数
- $存取周期T_m = 存取时间T_a + 恢复时间$
- 存储速度(数据传输率/带宽) = 数据的宽度 / 存储周期
3.2 存储器的层次化结构 #
存储器按靠近 CPU 的顺序依次为(速度依次变慢):
- 寄存器
- Cache
- 主存(内存)
- 辅存(硬盘)
- 外存(u盘等)
3.3 半导体随机存取存储器 #
3.3.1 SRAM 存储器 #
非破坏性读出, 无需回写, 速度块; 体积大(6 MOS)
常用作 Cache
只要一直通电就不需要刷新
送行列地址: 同时送(容量一般不大)
3.3.2 DRAM 存储器 #
破坏性读出(电容放电), 读出后需要回写, 速度变慢; 体积小(1个 MOS)
常用作主存(内存)
电容内的电荷通常只能维持 2ms, 在此期间必须刷新:
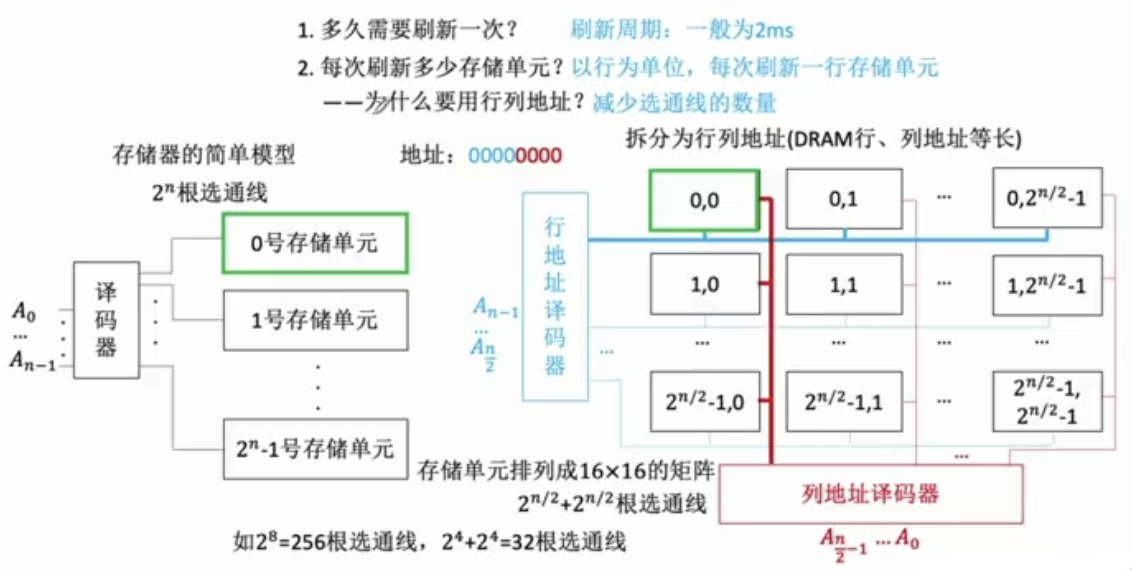
刷新 = 1次读 + 1次写, 占用一个读/写周期
刷新时机策略:
- 分散刷新 - 每次读写完都刷新一行
- 集中刷新 - 2ms内集中安排时间全部刷新(期间无法访问存储器)
- 异步刷新 - 2ms 内(利用CPU不需要访问存储器的时机)每行刷新一次即可
送行列地址: 共用一条地址线, 两次传输, 地址线减半, 引脚减少

3.3.3 Rom(大纲为 Flash 存储器) #
各类 ROM:
- MROM - 掩模式ROM, 生产过程写入, 之后不可重写
- PROM - 可编程ROM, 可写一次, 之后只读
- EPROM - 可擦除可编程 ROM
- UV EPROM - 紫外线擦除, 只能全部擦除
- E EPROM - 电擦除, 可部分擦除
Flash 即基于 EEPROM 发展而来
由于闪存需要先擦除再写入, 因此 “写” 速度比 “读” 速度更慢
计算机内 Rom 即存储 BIOS, 内存 + ROM 为主存
3.4 主存储器(重点) #
数据线的根数 = 存储芯片的位数
n 个地址线(0|1两种状态)可以表示 2^n 个地址数(状态)
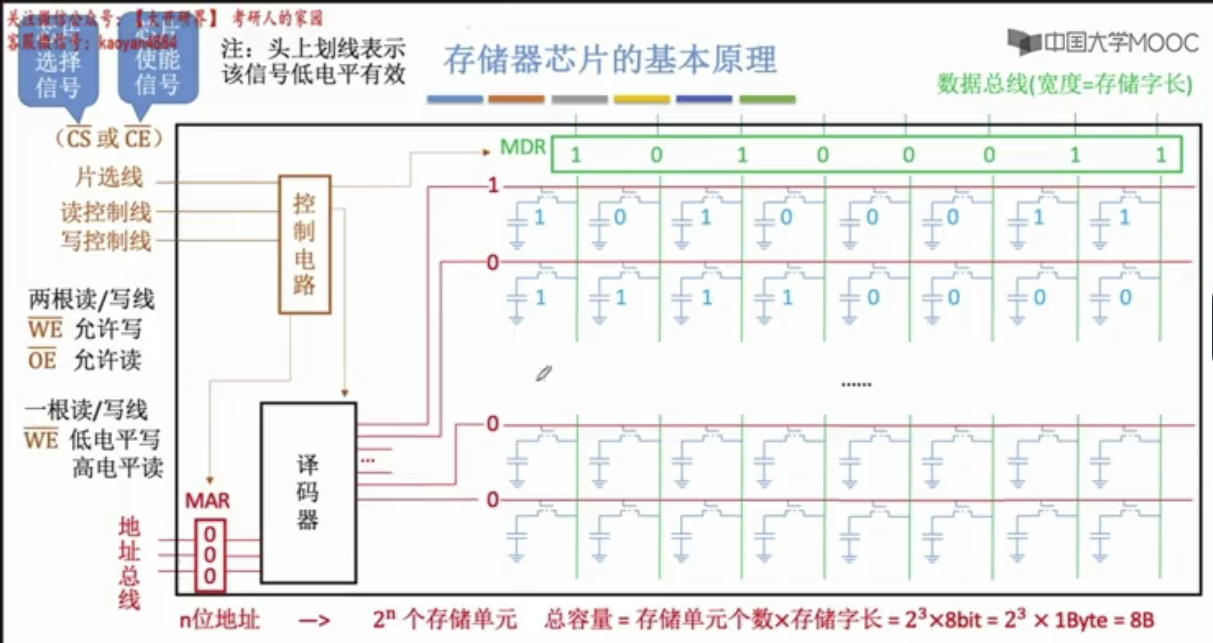
总结:
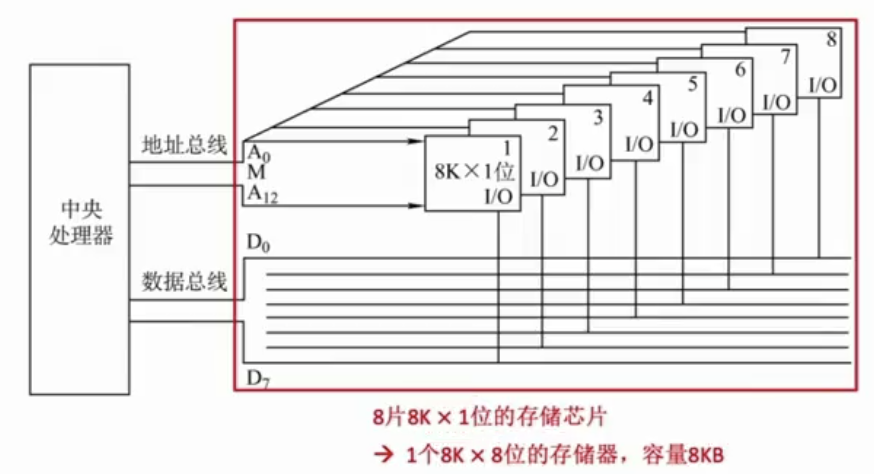
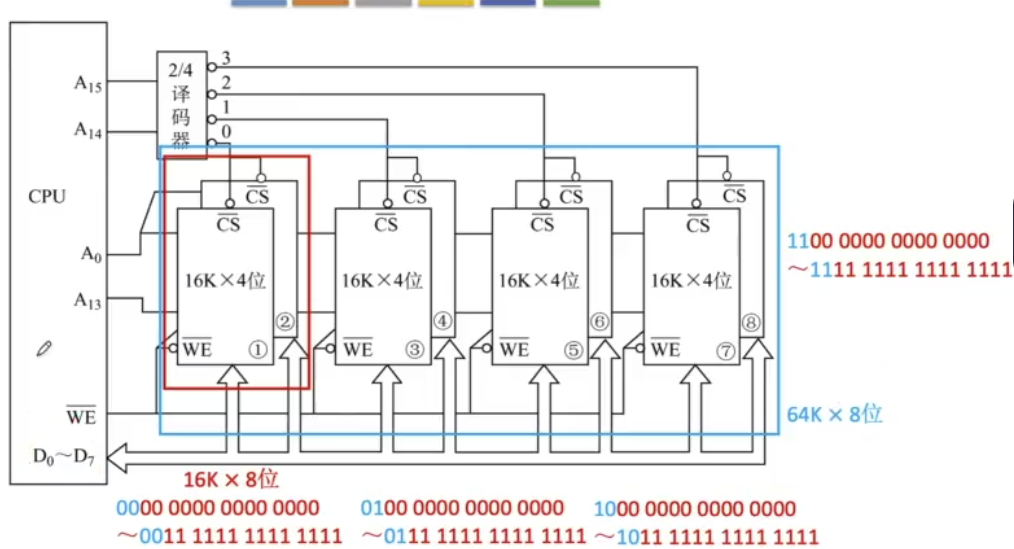
例题: 地址范围 0H-FFFFH, 16 位字长的存储器, 需要多少片 8k x 8 位的 RAM 芯片组成
- 所需芯片数 = 目标存储容量 / 芯片单位容量
- 存储容量 = 字数 x 位数
- 存储器容量: 64k x 16
- 字数 = (FFFFH - 0H) = 64k 字
- 位数 16
- 单个芯片容量: 8k x 8
- 存储器容量: 64k x 16
3.4.1 DRAM 芯片和内存条 #
3.4.2 多模块存储器 #
3.4.3 主存和 CPU 之间的连接 #

例题 #
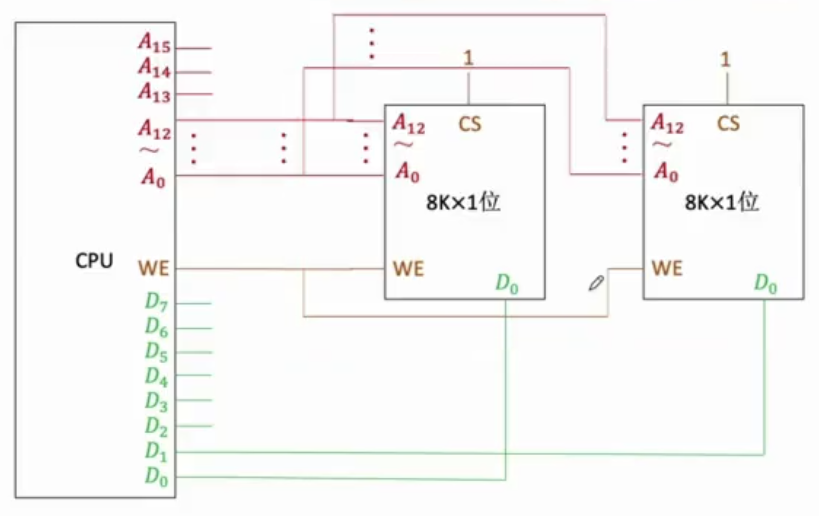
主存容量的扩展 #
位扩展 #
字扩展 #
译码片选法(即用译码器, 还有线选法, 缺点是地址浪费不连续)
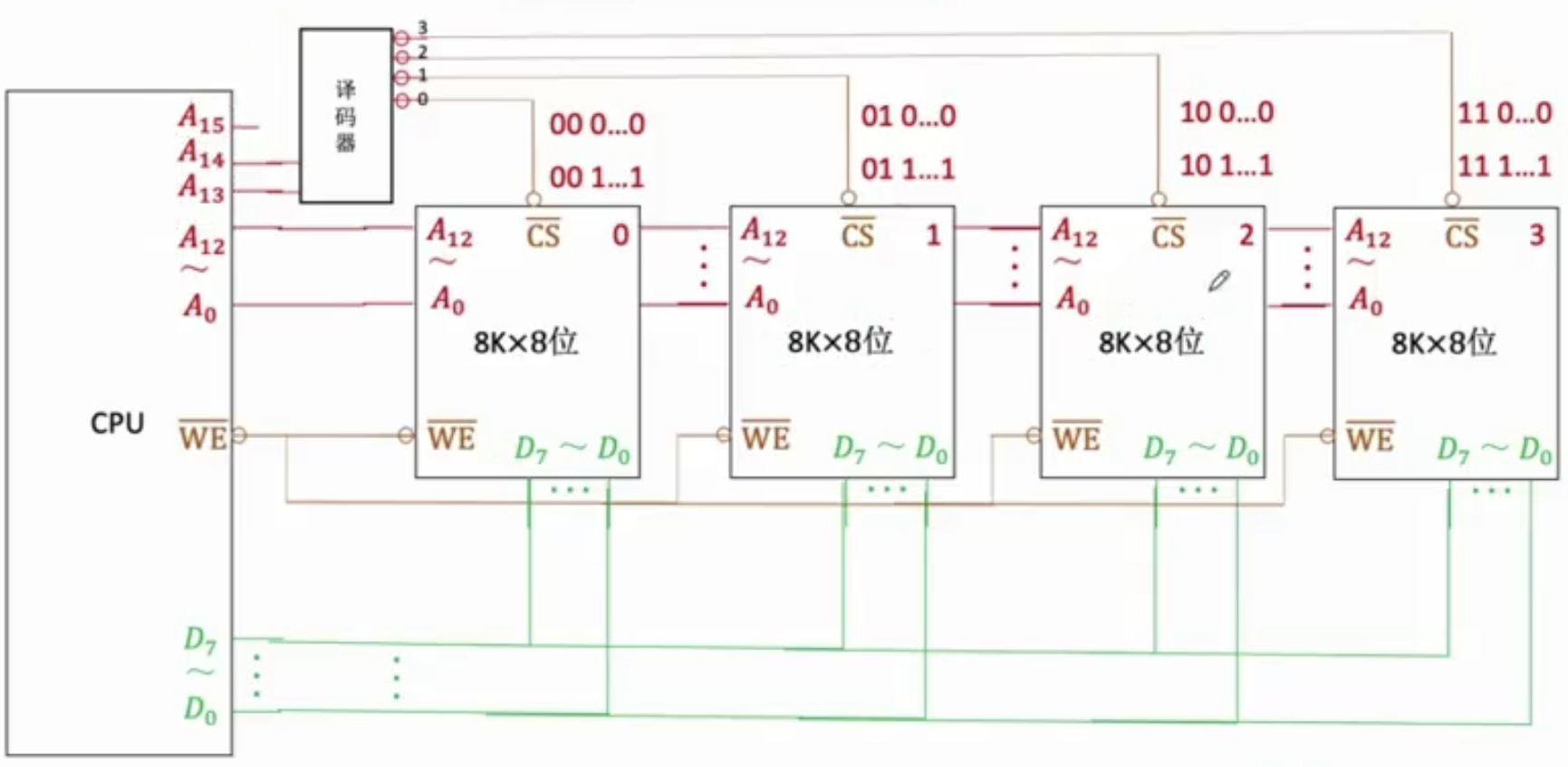
字位扩展(重点) #
主存速度的提升 #
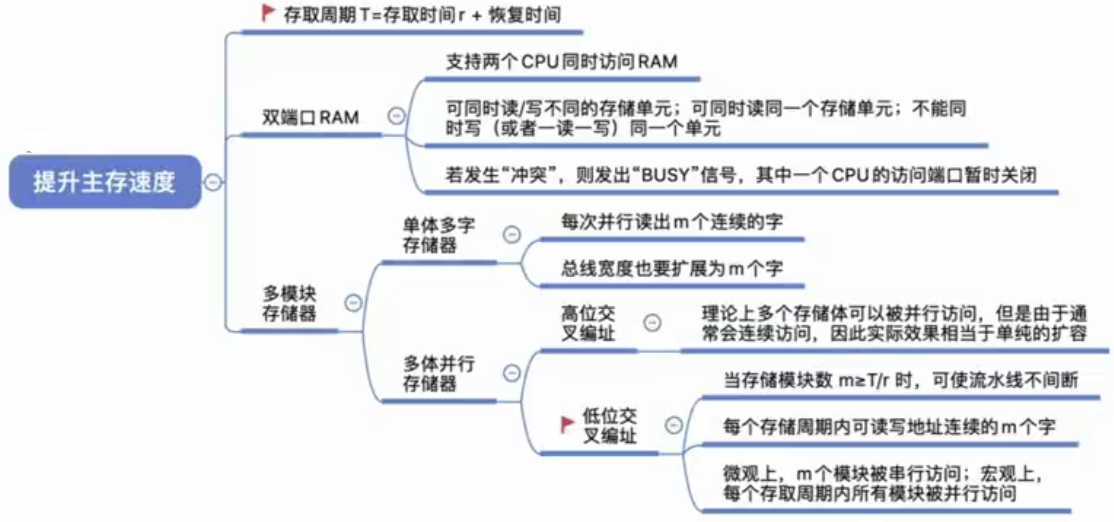
双端口 RAM() #
优化多核 CPU 访问同一根内存条的数据
重点在于同时访问时的读写冲突
多体并行存储器 #
多根内存条
高位交叉编址:
- 利用高位表明存储在第几个存储单元(体号)
- 地址连续, 顺序存取
- 不能并行访问, 不能提升吞吐率
低位交叉编址: - 低位地址表明存储在第几个存储单元
- 地址离散, 随机存取
- (连续访问时)双通道并行访问, 提升吞吐率
消费级计算机主板上, 01和23为一组, 组内高位交叉编址, 组间低位交叉编址
3.5 外部存储器 #
3.5.1 磁盘 #
3.5.2 SSD 固态硬盘 #
控制单元 + 多个闪存芯片
3.6 高速缓冲存储器-Cache(重点) #
3.6.1 Cache 基本原理 #
局部性原理 #
- 空间局部性 - 即将要用到的数据可能就在现在读取数据的周围
- 如何界定周围的数据 - 分块/行/页(例如以 1KB 为单位读取)
- 时间局部性 - 现在用的数据可能等下还会用
因此现在用的数据临时存储在高速存储中可以加速整体运行速度
两种读策略 #
- 先访问 cache, 未命中再访问主存(再复制到 cache)
- 同时访问, 若 cache 未命中再停止访问主存
3.6.2 Cache 和主存之间的映射方式(重点) #
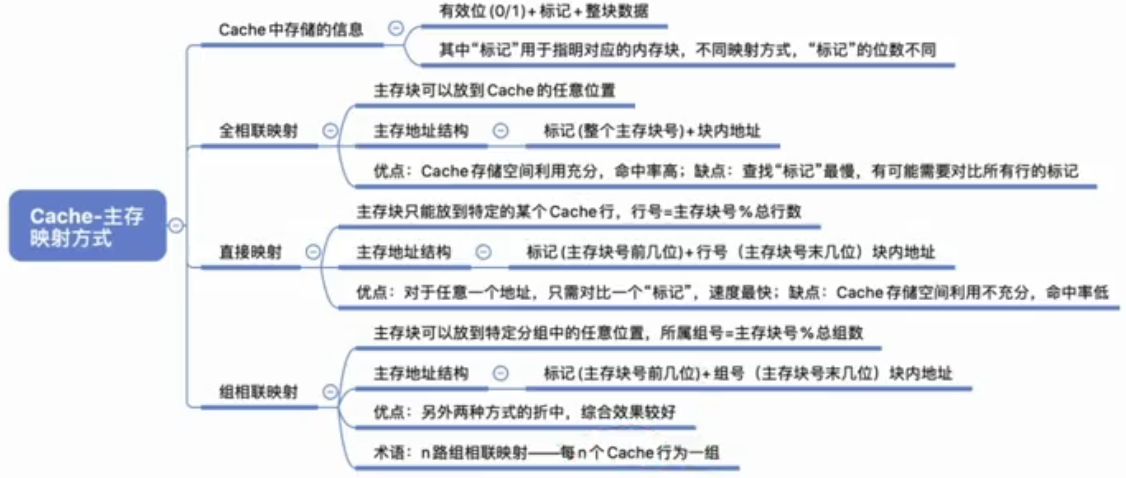
标记位: 标记 cache 块对应主存中的地址
全相联映射 #
主存块可以放置到 Cache 的任意位置
Cache 块和主存块大小相等
地址结构: 标记 + 块内地址
直接映射 #
每个主存块只能放到特定的位置 = 主存块号 % cache 总块数n
缺点: cache 空间利用率低
优点: cache 标记位变小
地址结构: 标记 + 块号(行号) + 块内地址
例题 #
假定主存地址为32位,按字节编址,主存和 Cache 之间采用直接映射方式, 主存块大小为4个字,每字32位,采用回写(Write Back) 方式,则能存放 4K字数据的 Cache的总容量的位数至少是多少?
- 确定块内地址位数(由块大小决定)
- 块大小 = 字数 x 位数 = 4 x 32位(即 4B) = 16B
- 需要 4 位表示 16 字节的地址偏移量(按字节编址)
- 确定块号(行号)位数
- 即 4K 字数据(16KB)需要多少块存储, 因此需要 1K 块(行)
- 故需要 10 位(2^10) 表示 1K 行
- 标记位 = 32 - 4 - 10 = 18 位
- cache 中每一行的位数 = 16B(数据部分) + 18位(标记位) + 1(状态位) + 1(脏位) = 148 位
- 总容量即 1k 行的位数 = 148 k
若计算机主存地址为32位,按字节编址,Cache 数据区大小为32KB, 主存块大小为32B, 采用直接映射方式和回写(Write Back)策略,则Cache行的位数至少是多少?
- 确定块内地址位数(由块大小决定)
- 块大小 =
组相联映射 #
Cache块分组, 组号 = 主存块号 % cache 总组数 n
主存块可放到对应分组的任意位置
地址结构: 标记 + 组号 + 块内地址
3.6.3 Cache 中贮存块的替换算法 #
Cache满了如何处理 - 替换算法
注意直接映射只能替换固定位置, 不需要算法
随机 #
实现简单, 没有考虑局部性原理, 命中率低
先进先出(FIFO) #
实现简单, 没有考虑局部性原理, 命中率低
最近最少用(LRU) #
计数器记录该行最近访问后的时间, 替换计数器最大的一行
效果优秀, 命中率高
最不经常使用(LFU) #
记录器记录该行被访问过的次数, 替换计数器最小的一行
没有较好的考虑局部性原理, 效果不如 LFU
3.6.4 Cache 写策略 #
CPU修改了Cache中的数据副本, 确保主存中数据一致性
根据写操作是否命中 cache, 分两种情况
写命中 #
- 写回法(Write back) - 只修改 cache, 此块被换出时才写回主存
- 全写法 - 同时写入 cache 和主存
- 为了减少全写的时间消耗, cache和主存直接会增加一个写缓冲
写不命中 #
- 写分配法 - 主存的块调入 cache, 在 cache 中修改, 常搭配写回法
- 非写分配法 - 只写入主存, 常搭配全写法
3.7 虚拟存储器(操作系统第三章重合) #
3.7.1 虚拟存储器的基本概念 #
虚拟存储器将主存(内存)和辅存(硬盘)地址空间统一编址, 将实际物理存放地址抽象为虚地址
3.7.2 页式虚拟存储器 #
一个进程逻辑上被分为若干大小相等的 “页”, 大小同块大小, 每个页可以离散的放入不同的主存块中, 主存的页成为实页, 辅存的页称为虚页
缺点: 页的大小固定, 容易不匹配实际情况而浪费
页表 #
存放于主存中, 记录虚页被调入主存时的位置
行组成:
- 有效位 - 表示页面是否装在主存
- 脏位 - 是否修改过(配合写回法写回磁盘)
- 引用位 - 配合 FIFO 或 LRU 等替换策略存储对应信息
- 内容 - 已调入主存则存放物理页号; 否则存放地盘地址
每个进程都有一个页表基址寄存器, 表明页表在主存中的存放地址(起点), 这样页表内只需要存储相对起点的偏移量即可
基本原理, 页表, 地址转换, TLB快表
TLB 快表 #
Todo
3.7.3 段式虚拟存储器的基本原理 #
段长按照程序逻辑结构划分
虚拟地址由段号和段内地址组成
缺点: 碎片化
段表 #
实现虚拟地址到实地址之间的转换
相比页表, 其存储项多了段长
3.7.4 段页式虚拟存储器的基本原理 #
先按逻辑结构分段, 每段再划分固定大小的页(主存块大小与之对应)
每个程序(进程)对应一个段表, 每段对应一个页表
虚地址: 段号 + 段内页号 + 页内地址
访问虚地址时:
-
根据段号拿到段表地址
-
从段表取出该段页表的起始地址
-
与段内页号合成, 得到页表地址
-
从页表中取出实页号
-
与业内地址合成, 得到主存实地址
-
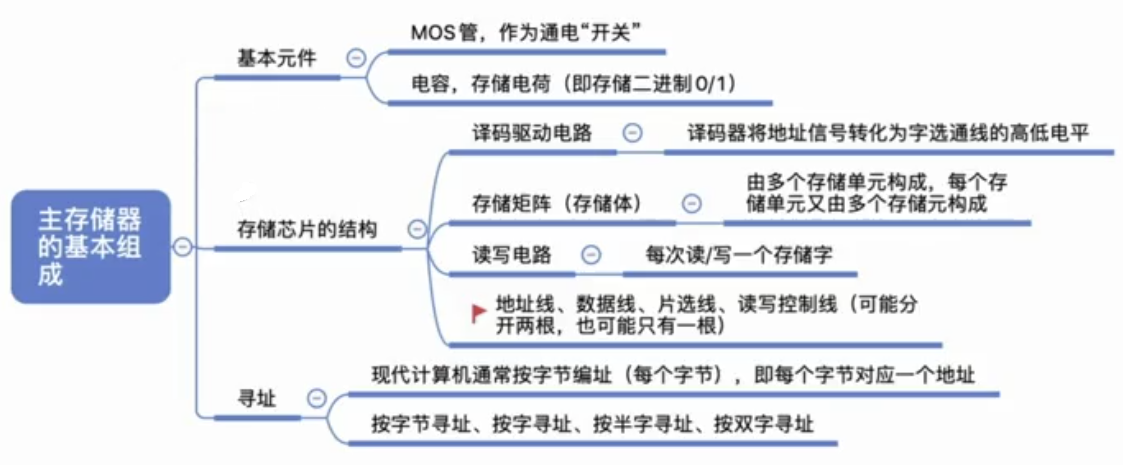
存储器概述
- 存储器的分类
- 多层级的存储器
- 存储器的性能指标
-
主存储器
- 存储芯片的原理 + 元件
- RAM
- SRAM
- DRAM(刷新, 地址复用技术)
- ROM
- 多体并行存储器
- 高位交叉编址
- 低位交叉编址
-
主存储器与CPU的连接
- 位扩展
- 字扩展
- 字位扩展
-
外部存储器
- 磁盘存储器
- 固态硬盘 SSD
-
高速缓存存储器Cache(可能出大题)
-
Cache的基本概念 + 局部性原理
-
Cache 的映射方式
- 直接映射
- 全相映映射
- 组相联映射
-
Cache 的替换算法
- 随机
- 先进先出(FIFO)
- 最近最少用(LRU)
- 最不经常使用
-
Cache 的写策略
- 写命中(全写法, 回写法)
- 写不命中(写分配法, 非写分配法)
-
虚拟存储器
-
页式虚拟存储器
- 快慢表
- 具有 TLB 和 Cache 的多级存储系统
-
段式存储器
-
段页式存储器
4. 指令系统 #
4.1 指令格式的基本概念 #
通常由: 操作码 OP, 地址码 A 组成
根据指令地址码数目不同将指令分类:
- 零地址指令 -
- 无需操作数, 如停机
- 需操作数, 操作数隐含在堆栈中
- 一地址指令
- 单操作数, 如取反 - $OP(A_1) => A_1$
- 双操作数, 另一隐藏在寄存器(如ACC)中 - $(ACC)OP(A_1) => ACC$
- 二地址指令 - $(A_1)OP(A_2) => A_1$
- 三地址指令 - $(A_1)OP(A_2) => A_3$
- 四地址指令
- $(A_1)OP(A_2) => A_3$
- $A_4 = 下一条指令的地址$(非顺序执行场景)
指令长度固定时, 地址码数量越多, 则单个地址越小, 寻址能力越弱
按照操作码长度将指令分类:
- 定长操作码
- 可变长操作码
按操作类型分类:
- 数据传输(LOAD / STORE)
- 运算类
- 算术
- 逻辑
- 移位
- 转移操作 - 改变执行顺序
- 无条件转移 JMP
- 条件转移 JZ
- 调用 CALL
- 返回 RETURN
- IO(输入输出)操作
4.2 指令格式 #
4.2.1 定长操作码 #
优点: 简单, 识别快
缺点: 表达指令有限; 操作数地址位数有限
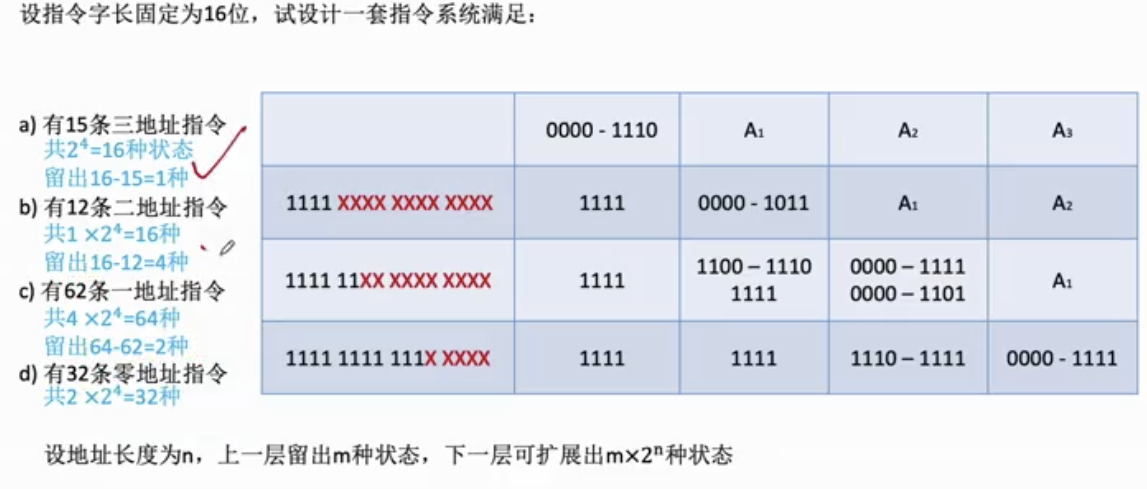
4.2.2 扩展操作码(重点) #
操作码的长度随地址码的减少而增加
短操作码不能与长操作码前面部分代码相同(例如将111留作扩展位)
应对使用频率较高的指令分配较短的操作码, 反之较长
例题:
4.3 寻址方式 #
4.3.1 指令寻址 #
CPU中用程序计数器(PC)指明下一条命令的地址
顺序寻址 #
PC 自增 1(1个指令的字长)
对于定长指令字结构:
若主存块大小 = 指令字长 = 存储字长, 每条指令读 1 次, PC 加 1
若主存按字节编址, 指令字长 = 存储字长 = 2Byte, 则每条指令需读两次, PC 加 2
对于变长指令字结构:
跳跃寻址 #
转移类指令直接修改 PC 值
4.3.2 数据寻址(重点) #
确定地址码指明的真实地址(例如相对地址)
因此指令格式中增加寻址特征(4位)表明寻址方式
以二地址指令为例, 现在的格式为:
操作码 OP + 寻址特征 + 形式地址A1 + 寻址特征 + 形式地址A2
隐含寻址 #
如单地址指令中使用 ACC 作为
立即寻址 #
存放操作数本身(一般为补码形式), 无需访问主存
直接寻址 #
形式地址即为真实地址, 类似指针
缺点: 地址码的位数决定了寻址范围; 地址不易修改
间接寻址 #
一次间接寻址: 指向操作数存储地址的地址(如主存地址的地址)
n次间接寻址即嵌套上述流程, 在主存中多次寻址(根据标记为判断是指针还是数据)
寄存器寻址 #
直接给出操作数所在的寄存器编号, 无需访问主存
寄存器少, 对应的地址码长度小
寄存器间接寻址 #
寄存器中存储的操作数在主存中的实际地址
相对寻址 #
形式地址为偏移量(补码), 以 PC 为起点
取出当前指令后, PC 会指向下一条指令
因此偏移量也是相对下一条指令的
基址寻址 #
形式地址为偏移量, 以程序的起始存放地址(基址寄存器BR)为起点
由于基址寄存器是面向操作系统的, 也可指定寄存器作为基址寄存器
此时寻址特征还需要指明寄存器地址, 长度取决于寄存器总数
利于多道程序场景
变址寻址 #
形式地址为基地址, 程序(用户)决定偏移量, 存放于变址寄存器 IX 中
同样的, 也可能操作系统没有 IX 而存放在通用寄存器中
变址寄存器是面向程序(程序员), 可以被程序运行时修改
适合循环程序, 数组问题等
多道程序+访问数组场景可思考基址&变址复合寻址
堆栈寻址 #
操作数隐含在堆栈指针(寄存器) SP 中
堆栈分两种:
- 硬堆栈 - 寄存器堆栈, 速度快, 容量低
- 软堆栈 - 主存堆栈
4.4 数据的对齐和大/小端存放方式 #
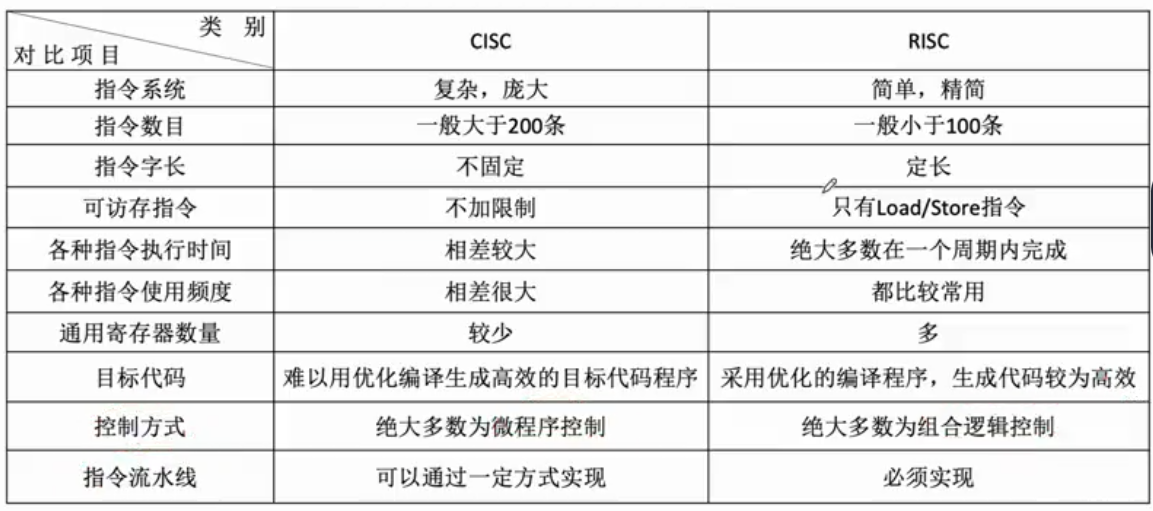
4.5 CISC和RISC的基本概念 #
CISC: 复杂指令集计算机
RISC: 精简指令集计算机
4.6 高级语言和机器码之间的对应 #
4.6.1 编译器、汇编器和链接器 #
4.6.2 选择结构语句的机器码 #
4.6.3 循环结构语句的机器码 #
4.6.4 函数调用的机器码 #
5. 中央处理器(重点) #
5.1 CPU 的功能与基本结构(控制器, 运算器) #
功能:
- 指令控制
- 取指令 - 形成指令地址, 自动发出取指命令
- 分析指令 - 操作码译码, 操作数寻址
- 执行指令
- 操作控制
- 时间控制
- 数据加工
- 中断处理
5.1.1 运算器 #
基本结构:
- 算术逻辑单元 ALU
- 暂存寄存器 Y
- 累加寄存器 ACC
- 通用寄存器组(供用户自由编程)
- 程序状态寄存器
- 移位器
- 计数器 - 控制乘除运算的操作步数
5.1.2 控制器 #
基本结构:
- 程序计数器 PC
- 指令寄存器 IR - 保存当前正在执行的命令
- 指令译码器
- 存储器地址寄存器 MAR - 要访问的主存单元的地址
- 存储器数据寄存器 MDR - 要向主存写入或从主存读出的信息
- 微操作信号发生器
- 时许系统
5.2 指令的执行过程(重点-大题) #
指令周期: CPU 从主存中每取出并执行一条指令所需的全部时间
机器周期 一个指令周期通常用若干个机器周期表示, 也叫 CPU 周期
时钟周期 一个机器周期包含若干时钟周期, 也叫节拍或 T 周期, 也是 CPU 操作的基本单位
不同指令的指令周期组成(4种工作周期):
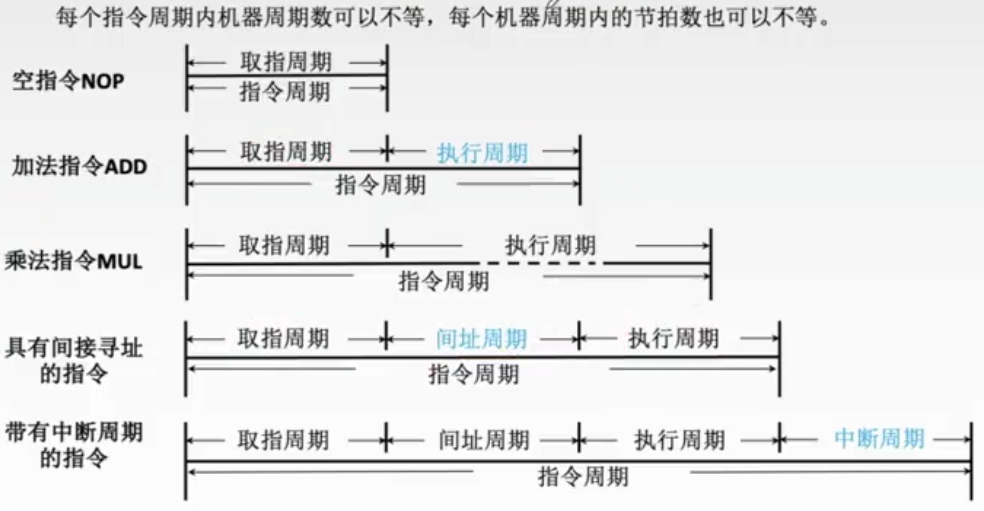
考察体型: 给指令描述各个阶段的微操作(数据流和控制信号)
5.2.1 指令周期的数据流 #
为了区分不同的工作周期, CPU 内设置了 4 个标志触发器
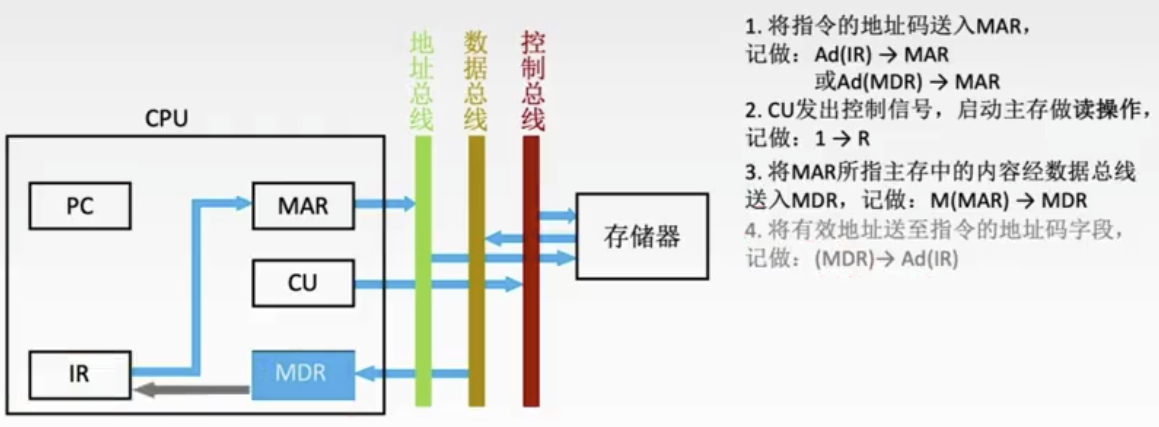
取指周期 - FE #
从主存取出指令代码并存放在 IR 中(最后PC+1)
间址周期 - IND #
取操作数的有效地址, 以一次间址为例:
执行周期 - EX #
取操作数
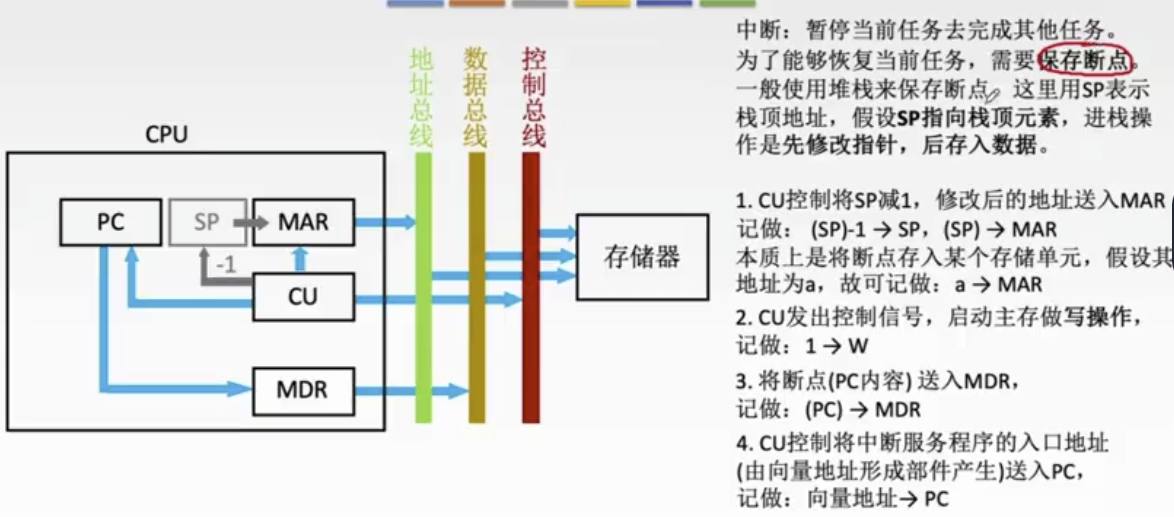
中断周期 - INT #
处理中断请求, 保留当前执行位置(上下文)
5.2.2 指令周期方案 #
单指令周期 #
所有指令选用相同的执行时间完成, 指令周期取决于耗时最长的指令
指令之间串行执行
多指令周期 #
不同指令选用不同的执行时间
指令之间串行
流水线方案 #
指令之间并行
5.3 数据通路的功能和基本结构 #
3种数据流动: 寄存器 <=> 寄存器 | ALU | 主存
数据通路: 描述信息从哪里开始, 经过哪些部件, 最后到哪里
数据通路的三种基本结构(注意CPU内部总线有别于系统总线):
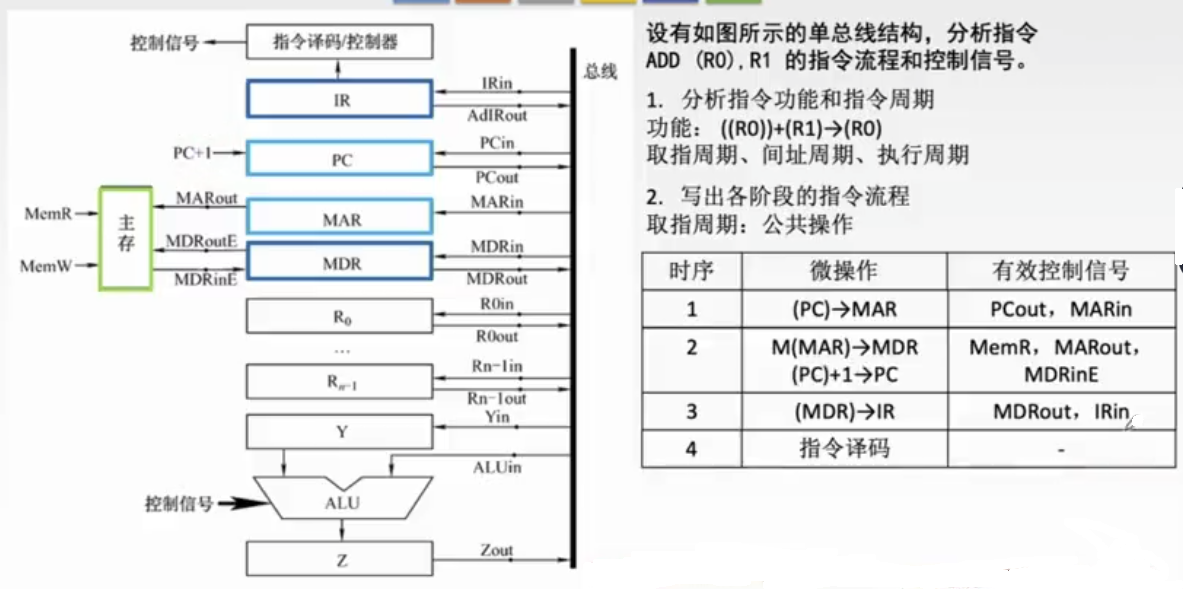
5.3.1 CPU 内部单总线 #
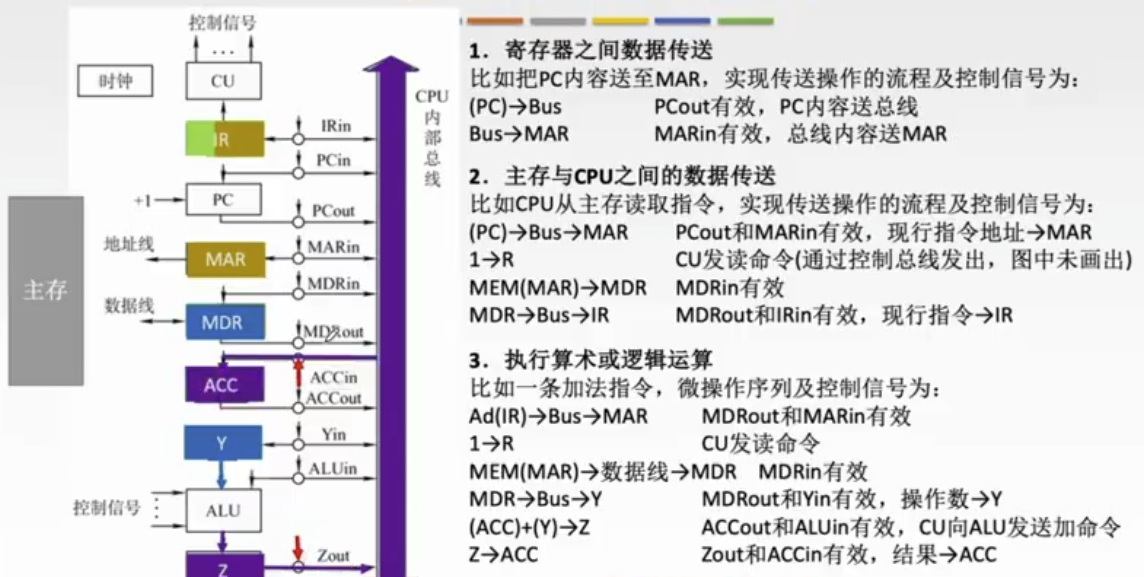
5.3.1 CPU 内部多总线 #
多总线 ALU 可以直接通过总线读取两个操作数, 不再必须暂存寄存器
5.3.1 专用数据通路 #
多路选择器与三态门
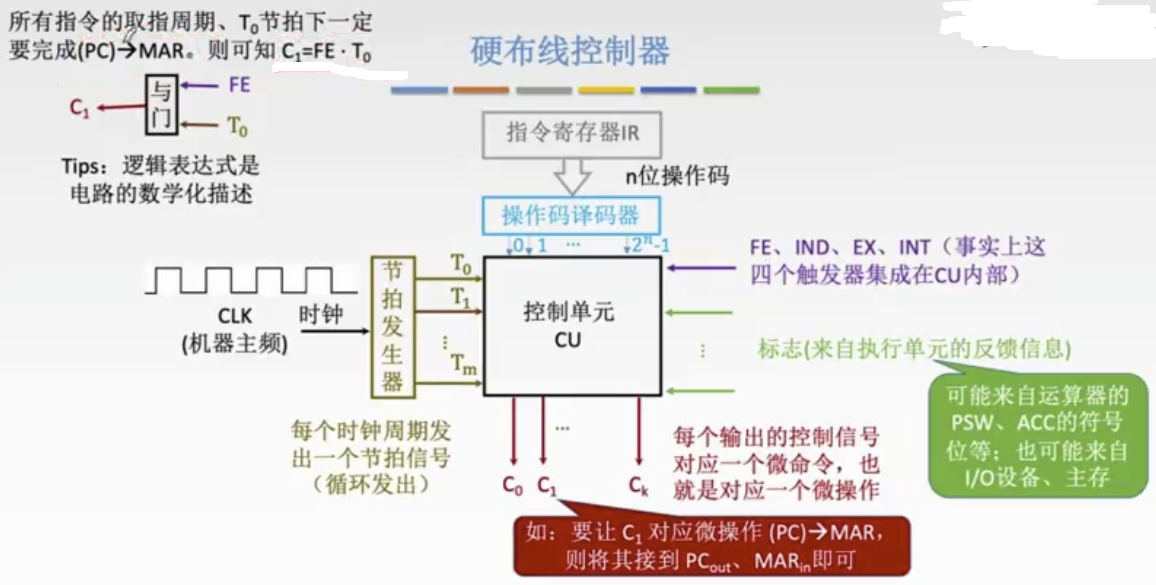
5.4 控制器的功能与原理(重点) #
根据指令操作码, 目前的机器周期, 节拍信号和机器状态条件, 判断现在这个节拍下应该发出哪些"微命令"
一条机器指令可以分解为一个微操作序列, 微命令是微操作的控制信号, 微操作是微命令的执行过程
指令是对微指令功能的"封装"
5.4.1 硬布线控制器 #
纯硬件实现
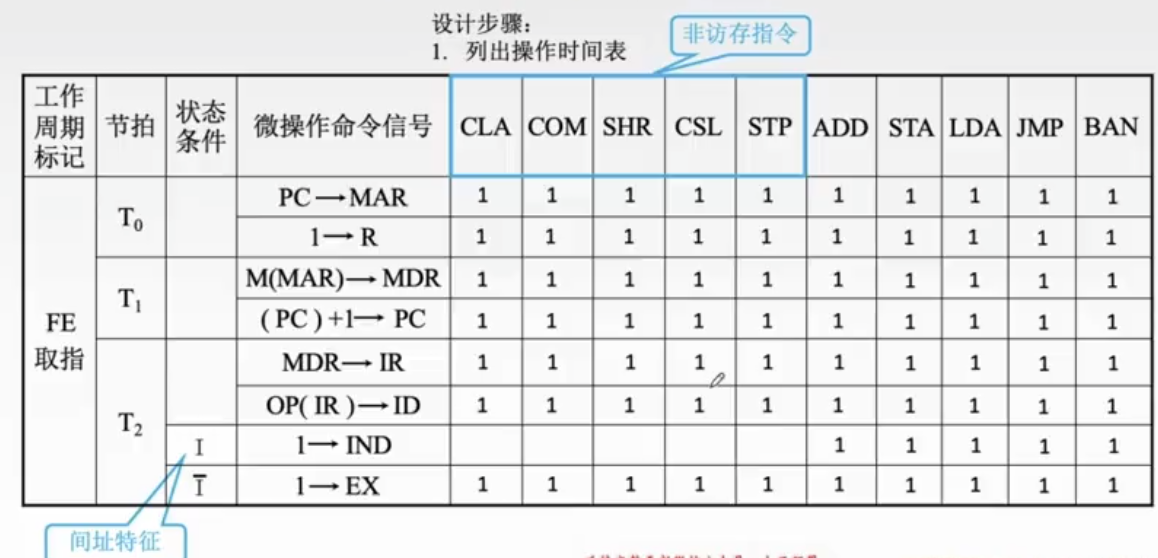
设计硬布线控制器的步骤:
- 分析每个阶段的微操作序列

- 选择 CPU 的控制方式 - 如采用定长机器周期, 一个机器周期安排3个节拍
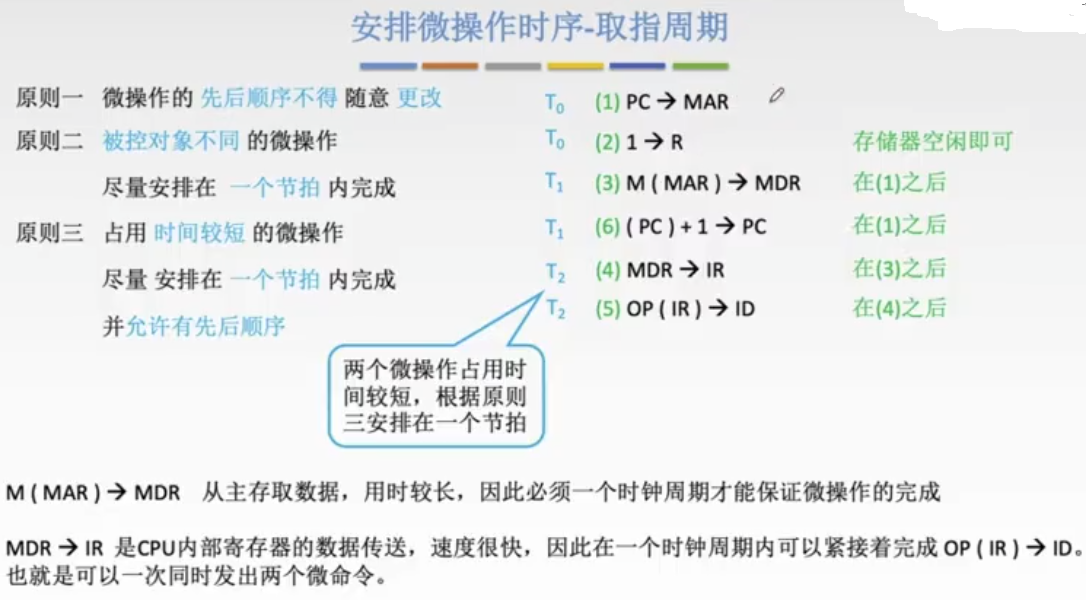
- 安排微操作时序 - 如何在3个节拍内完成整个机器周期内的所有操作
- 原则1: 微操作的先后顺序不得随意更改(例如某操作必须在某操作后)
- 原则2: 被控对象不同的微操作, 尽量安排在一个节拍内完成
- 原则3: 占用时间较短的位操作尽量安排在一个节拍内完成, 并允许有先后顺序
- 电路设计 - 确定每个微操作命令的逻辑表达式, 并用电路实现
特点:
- 指令越多, 硬件设计越复杂, 因此一般用于 RISC
- 指令扩充困难
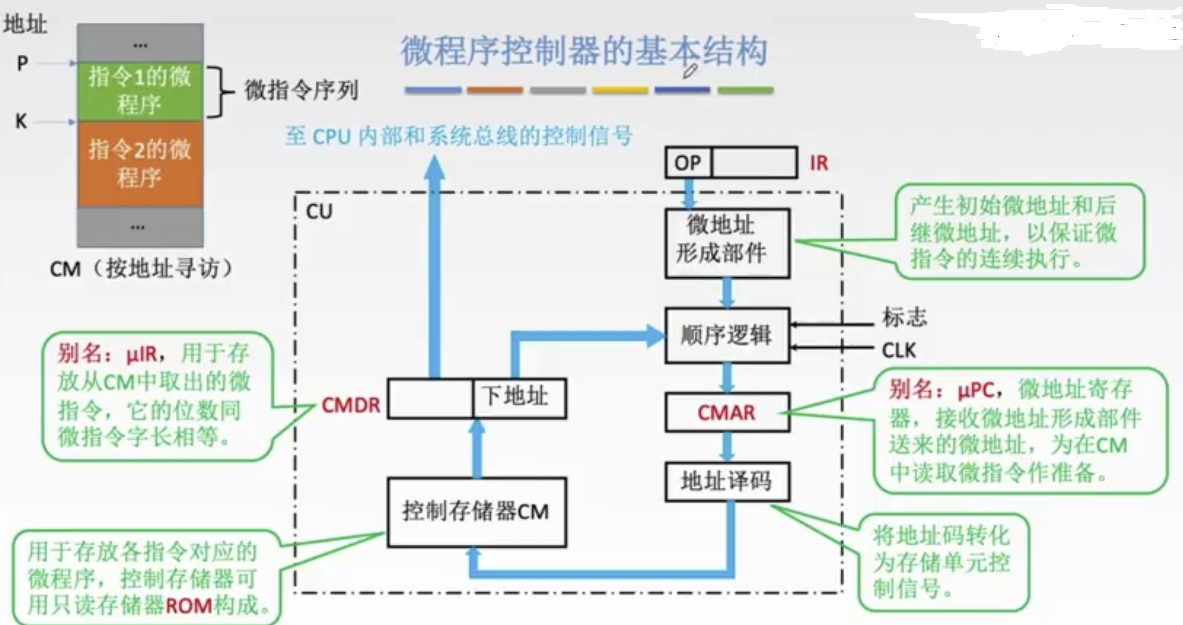
5.4.2 微程序控制器(重点-大题) #
硬件+软件实现
控制存储器 CM: 用于存放各指令对应的微程序, 用只读 ROM 实现
由于取指, 间址和中断周期执行的指令都是通用的, 可以精简实现
5.4.2.1 微指令的设计 #
微指令格式 #
- 水平型微指令 - 一条微指令能定义多个可并行(相容)的微命令
- 微程序短, 集成度高, 执行速度快
- 微指令长, 编写复杂
- 垂直性微命令 - 一条微指令只能定义一个(互斥)微命令, 由微操作码字段规定具体功能
- 微指令短, 简单规整, 易于编写
- 微程序长, 执行速度慢
- 混合型微指令 - 垂直型基础上增加一些不太复杂的并行操作
(水平型)微指令的编码方式(重点) #
目标是保证速度的情况下, 尽量缩短微指令字长
-
直接编码
每一位代表一个微操作命令, 某位为1表示控制信号有效 优点: 简单直观, 可并行, 速度快
缺点: n个微命令就要求微指令的操作字段有 n 位 -
字段直接编码
将互斥的微命令分在同一段, 相容的微命令分在不同段
以一段长度为3位为例, 直接编码可以表示3种命令, 分段编码移码后可以表示 8 种
但通常将 000 保留位不操作, 所以能表示7种互斥的微命令
优点: 可以缩短微指令字长
缺点: 需要经过移码电路再发出微命令, 稍慢
- 字段间接译码
一个字段中的某些微命令需要由另一个字段的某些微命令来解释
(下一条)微指令的地址形成方式 #
- 微指令的下地址字段指出 - 断定方式
- 根据机器指令的操作码形成
- 增量计数器法 - (CMAR) + 1 => CMAR, 适用于后续微指令地址连续的情况
- 分支转移
- 通过测试网络
- 硬件产生的微程序入口地址(如开机第一条微指令的地址)
5.4.2.2 微程序控制单元的设计 #
步骤:
- 分析每个阶段的微操作序列(同硬布线)
- 写出对应机器指令的微操作命令及节拍安排
- 写出每个周期所需要的微操作(参照硬布线)
- 补充微程序控制器特有的微操作:
- 取指周期: (除最后一条)每条微指令结束后
- 根据下地址信息指明接下来要执行的微指令存放地址
- 即 Ad(CMDR) => CMAR
- 取指周期: 最后一条微指令执行完后需要
- 根据指令操作码确定其执行周期的微程序首地址
- 即下一周期(如执行周期)的第一条微指令地址
- OP(IR) => 微地址形成部件 => CMAR
- 执行周期: (除最后一条)每条微指令结束后
- Ad(CMDR) => CMAR
- 取指周期: (除最后一条)每条微指令结束后
- 确定微命令格式
- 根据微操作个数确定编码方式, 进而确定微指令操作控制字段位数
- 根据 CM 中微指令总数, 确定微指令顺序控制字段位数
- 确定微指令字长
- 编写微指令码点(xxx代表xx命令)
5.5 异常和中断机制(重点) #
微指令控制字段分为若干段, 每段经过译码后发出控制信号
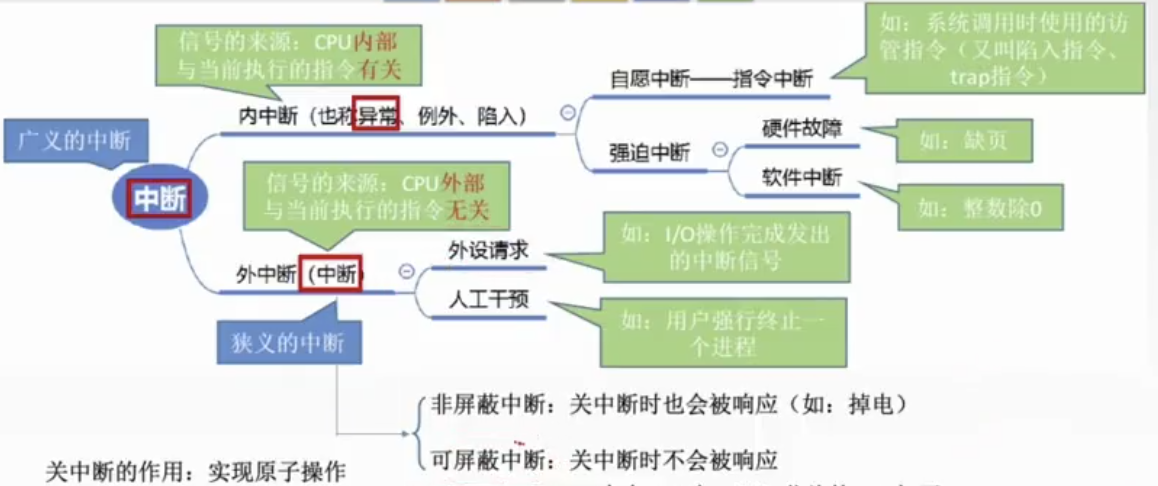
5.5.1 异常和中断的基本概念 #
5.5.2 异常和中断的分类 #
5.5.3 异常和中断的检测与响应 #
5.6 指令流水线(重点-大题) #
5.6.1 指令流水线的基本概念 #
将指令的执行过程分成多个阶段(如取指, 分析, 执行)
指令流水即再上一个指令还未执行完时, 开始执行下一条指令(如第二条执行分析, 第一条执行取指)
根据重叠的阶段数可分为: 一次重叠/二次重叠
性能指标:
- 流水线的吞吐率: 单位时间内流水线完成的任务数量
- 加速比: 完成同样一批任务, 不适用流水线和使用的时间之比
- 效率: 流水线的设备利用率
5.6.2 指令流水线的基本实现 #
流水线设计原则:
- 流水段个数以最复杂指令所用功能段个数为准(x段流水线)
- 流水段长度以最复杂操作所需时间为准 - 各流水段长度相同, 以最长为准
- 因此每个功能段后面都需要添加缓冲寄存器(锁存器)给下个流水段使用
- 可能会导致单条指令执行时间变长
基于流水线批量,规格化的设计思路, 指令集也该具有如下特征:
- 指令长度尽量一致, 简化取指和指令移码; 否则取指未命中缓存, 会频繁导致流水线断流
- 指令格式尽量规整, 尽量保证源寄存器位置相同, 有利于指令未知时可提前取数
- 存取统一使用 Load/Store 指令(RISC即这样实现)
指令流水线的影响因素和分类 #
流水线的影响因素 #
- 结构相关(资源冲突) - 多条指令同一时刻争用同一资源形成冲突
- 后一指令暂停一周期
- 资源重复配置
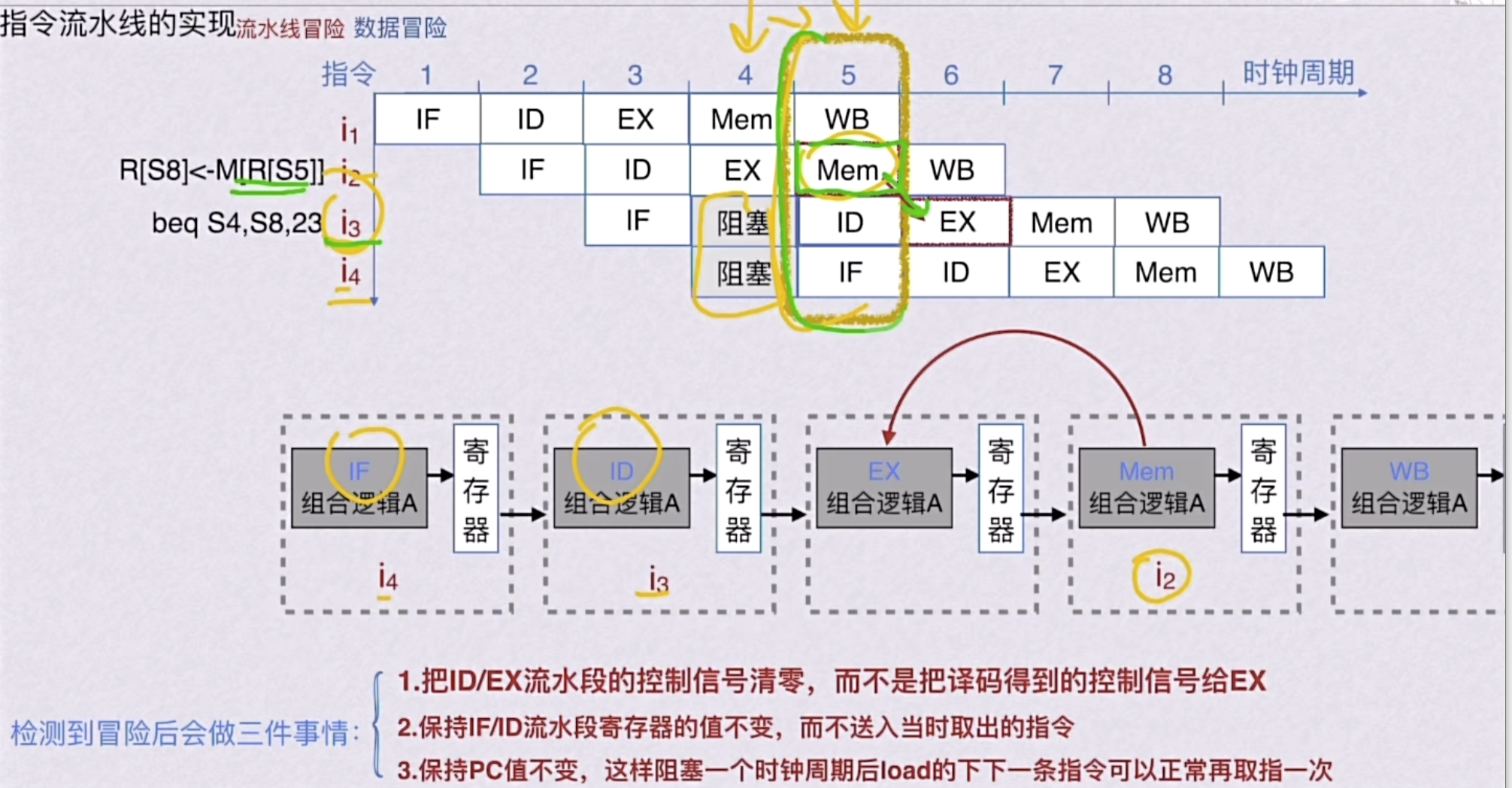
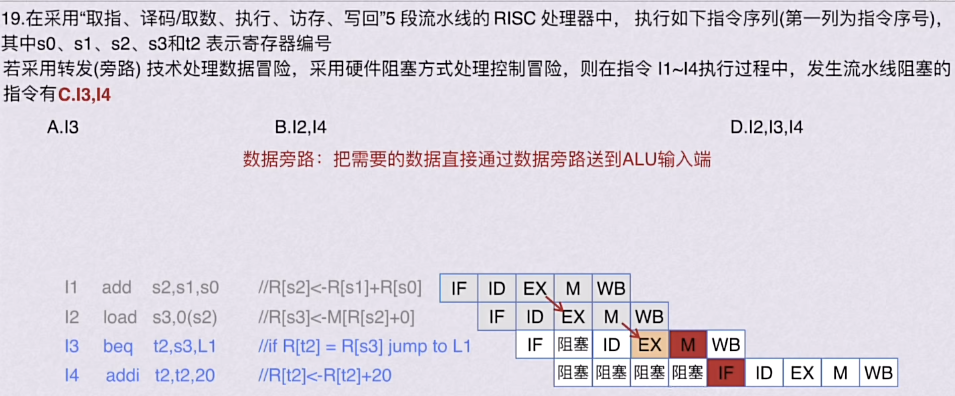
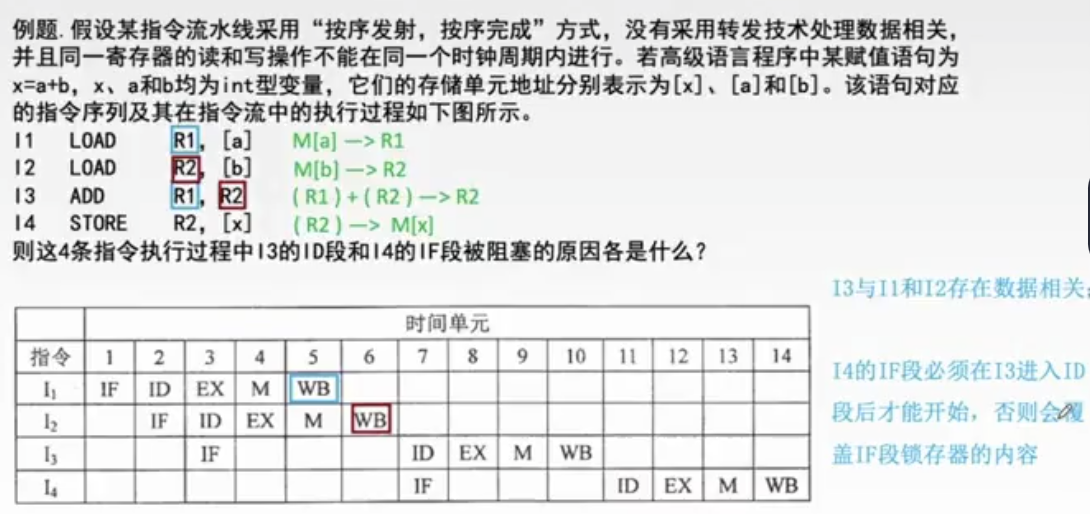
- 数据相关(数据冲突) - 程序中后续指令依赖前面指令的计算结果
- 数据冲突相关指令及其后续指令暂停(硬件阻塞/软件插入NOP)
- 数据旁路(算好直接送到后续指令流水, 不等待写回)
- 增加一个锁存器暂存运算结果, 后续流水线运行直接使用
- load-use 冒险
-
- 编译优化, 调整指令顺序
- 控制相关 - 遇到转移指令或其他改变 PC 的指令从而造成断流
- (转移指令)分支预测 - 简单true/false或者根据历史情况动态预测
- 预取指令, 提前取出成功和不成功的后续指令, 需要增加指令寄存器
- 加快和提前形成条件码
例题:
流水线的分类 #
根据流水线的使用级别:
- 部件功能级 - 流水线专注于完成某种功能如加法操作拆分为流水线
- 处理机级 - 一条指令解释过程拆分, 如拆分为取指译指执行
- 处理机间级 - 宏流水, 每个处理及专门完成一种任务
根据可以完成的功能:
- 单功能
- 多功能
根据同一时间内各段之间的连接方式:
- 静态 - 同一时间内, 流水线各段只能按同一功能的连接方式工作
- 动态 - 同一时间内, 某段实现某种运算, 另一些段进行另一种运算
根据各个功能段之间是否有反馈信号:
- 线性
- 非线性
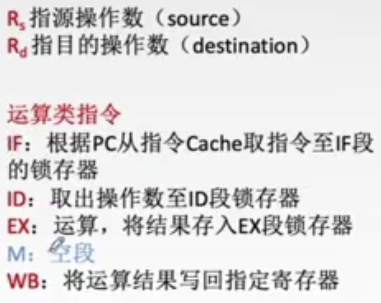
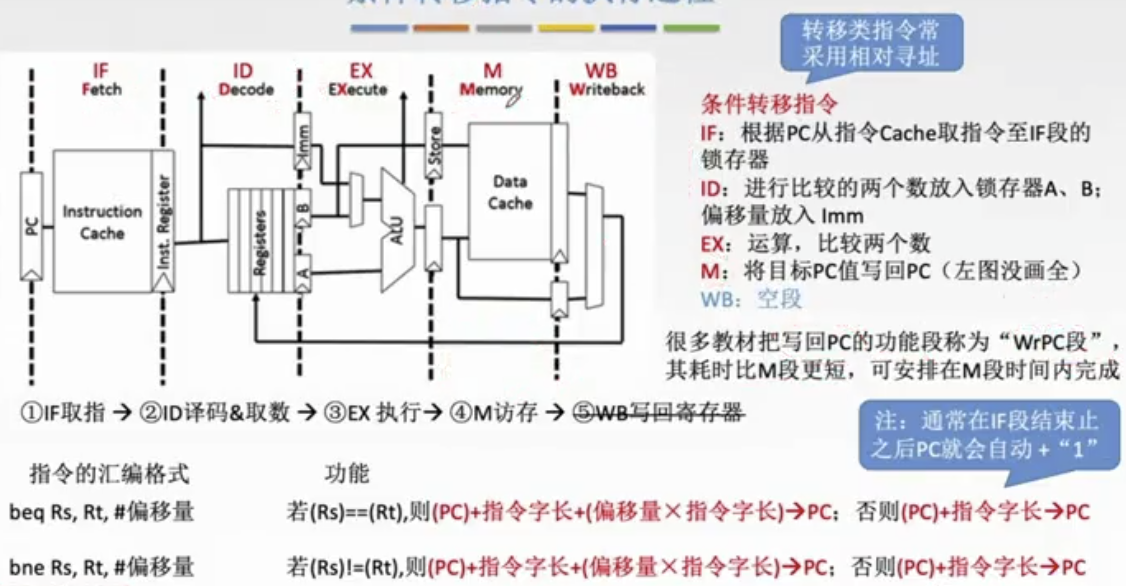
五段式指令流水线(核心重点-大题) #
五段分别为:
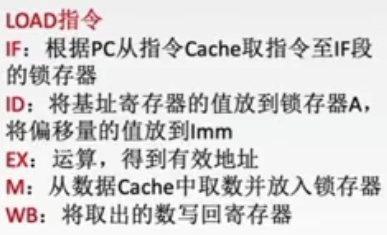
- IF(Fetch) - 取指
- ID(Decode) - 译码
- EX(Excute) - 执行
- M(Memory) - 访存
- RISC直接从寄存器取, 无需访问主存
- 大部分情况下都会命中缓存, 否则访问主存会花费一个时钟周期
- WB(Writeback) - 写回寄存器
常考察以下五类指令在流水线中的执行和冲突问题
真题例题:
运算类指令 #
LOAD指令 #
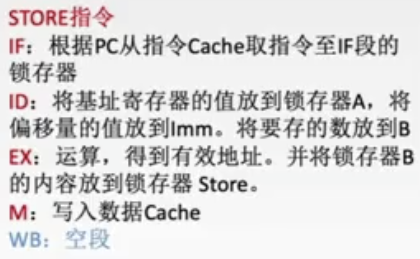
STORE指令 #
条件转移指令 #
转移类指令常采用相对寻址(PC + 偏移量)
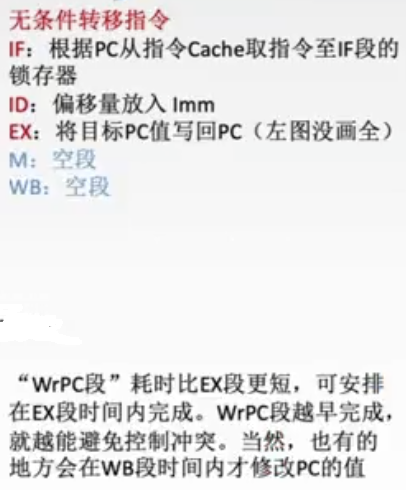
无条件转移指令(jmp) #
5.6.3 结构冒险, 数据冒险和冒险控制的处理 #
5.6.4 超标量和动态流水线的基本概念 #
超标量流水线: 每个时钟周期并发多条独立指令(每个指令又开启一条流水线)
5.7 多处理器基本概念 #
5.7.1 SISD, SIMD, MIMD, 向量处理器的基本概念 #
5.7.2 硬件多线程的基本概念 #
5.7.3 多核处理器的基本概念 #
5.7.4 共享内存多处理器(SMP)的基本概念 #
- CPU 的功能与基本结构
- 指令的执行过程(可能出大题)
- 指令周期
- 取值周期
- 间址周期
- 执行周期
- 中断周期
- 数据通路(基本功能, 三种方式的基本结构)
- 控制器的功能与原理
- 结构与功能
- 两类控制器
- 硬布线控制器
- 微程序控制器
- 异常和中断机制(分类, 响应过程)
- 指令流水线
- 性能指标
- 影响因素
- 分类
- 多并发技术
- 五段式流水线(重中之重, 大题)
- 多处理器的基本概念
6. 总线 #
6.1 总线的基本概念 #
总线的: 一组能为多个部件分时共享的公共信息传送线路
- 分时 - 同一时刻只允许一个部件向总线发送信息
- 共享 - 多个部件可以同时从总线上接受相同的信息
总线按功能分类:
- 片内总线 - 芯片内部的总线, 如 CPU 与 ALU 与寄存器直接
- 系统总线 - 计算机内各部件(CPU, 主存, IO接口)之间互相连接的总线
- 数据总线
- 传输各功能部件间的数据信息, 双向传输
- 双向传输
- 位数与机器字长, 存储字长相关
- 地址总线
- 指出数据总线上元数据或目的数据所在主存单元或IO端口的地址, 单向传输
- 位数与主存地址空间的大小相关
- 控制总线
- 传输控制信息, 包括CPU送出的控制命令和其他设备返回CPU的反馈信号
- 数据总线
- 通信总线 - 与其他计算机系统之间通信
6.2 总线的组成和性能指标 #
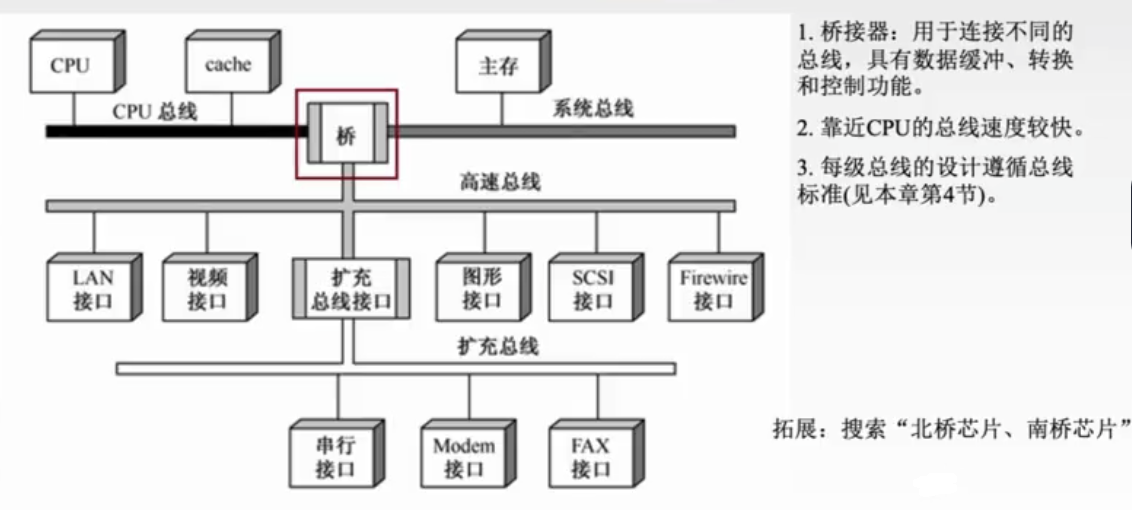
6.2.1 总线结构(重点) #
- 单总线结构
- 一套, 而非一根, 数据/地址/控制总线还是完整的
- CPU, 主存, IO 设备都挂在该总线上
- 不支持并发, IO 设备速度慢会拖累总线整体速度
- 双总线结构
- 分为主存总线和IO总线, 主存总线新增加通道连接IO总线
- 分级缓存思想
- 三总线结构
- 区分高/低速IO设备, 进一步细化分级缓存, 提高了 IO 性能
- 缺点: 三条总线只能同时有一个工作, 效率较低
-
- 四总线结构(扩展知识不考察)
- 现代计算机结构
-
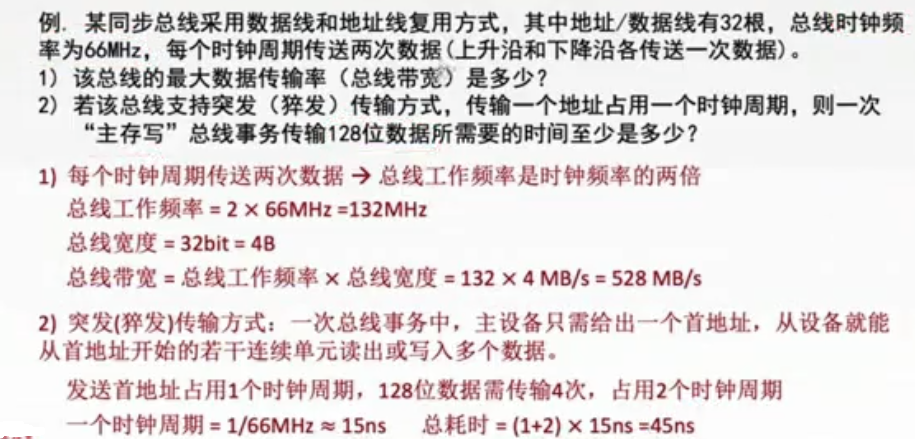
6.2.2 性能指标 #
- 总线的传输周期(总线周期) - 一次总线操作所需的时间(申请/寻址/传输/结束)
- 总线的时钟周期 - 机器的时钟周期
- 现代计算机也可能由桥接器提供, 不考察
- 总线的工作频率 - 总线周期的倒数, 即一秒内传送几次数据
- 总线的时钟频率 - 时钟周期的倒数
- 总线宽度(总线位宽) - 能够同时传输的数据位数, 通常指数据总线根数
- 总线带宽 - 单位时间可传输数据的位数 = 工作频率 x 位宽
- 指最高数据速率,非有效信息速率
- 总线复用 - 如用同一组线分时传输地址和数据信息
- 信号线数 - 数据/地址/控制3种总线数的总和
例题 #
6.3 总线事务和定时 #
6.3.1 总线仲裁 #
解决多个(主)设备同时竞争总线控制器的问题
集中仲裁(重点) #
- 链式查询 - 由总线控制器发出总线允许信号(BG)
- 离的越近的设备越先接收到信号并发出总线忙信号(BS)
- 优先级固定, 电路故障敏感, 距离远的设备可能长期获取不到控制权
- 计数器定时查询
- 用计数器控制总线使用权(计数器值 === 设备地址)
- 多了一组设备地址线, 少了一根总线响应线BG
- 可以通过调整计数器初始值调整优先级, 电路故障不敏感
- 线束增加, 控制复杂
- 独立请求
- 每个设备都有总线请求线BR和总线允许线BG, 总线控制器负责排队
- 响应快, 控制优先级灵活
- 控制线多, 2n(BR + BG) + 1(BS) 条
分布仲裁 #
每个主模块都有自己的仲裁器和仲裁号
请求总线时, 将自己的仲裁号发送到共享的仲裁总线上
根据仲裁号的优先级响应保存在仲裁总线上, 并撤销其它仲裁号
6.3.2 总线操作 #
总线传输的4个阶段:
- 申请分配阶段(传输请求 + 总线仲裁)
- 寻址阶段 - 本次主设备发出要访问的从设备的地址和有关命令
- 传输阶段
- 结束阶段 - 主设备撤除自己在系统总线上的信息, 让出总线使用权
6.3.3 总线定时 #
控制数据传输的时间节点
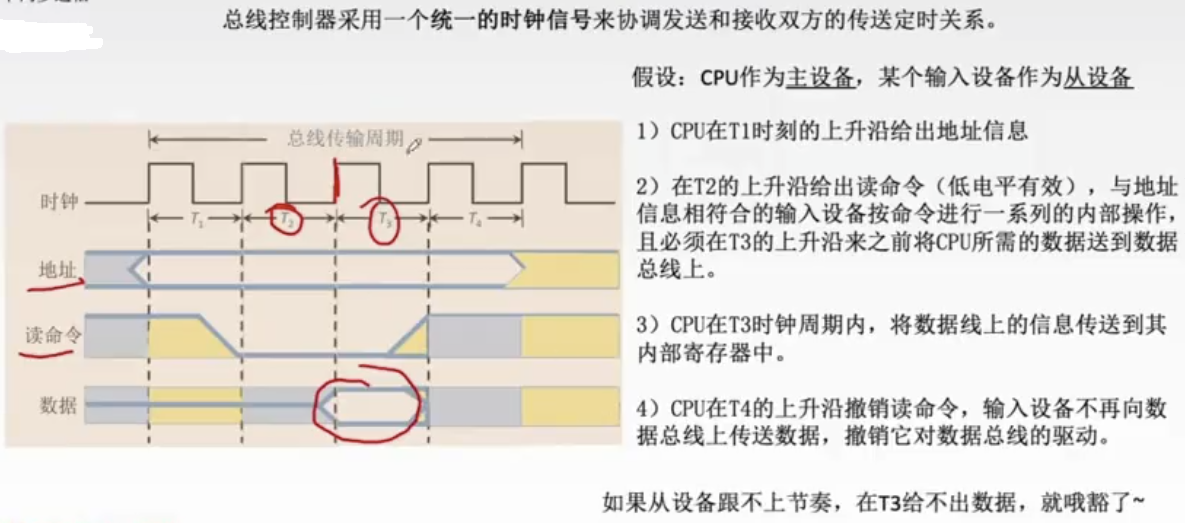
同步定时方式 #
强制在始终周期的节点进行特定操作, 简单快, 但可靠性差
例如: 发送方在时钟前沿发信号; 接收方在时钟后沿判断识别
适用总线长度短或各部件存取时间相近的系统
异步定时方式(重点) #
依靠握手信号实现定时控制, 主设备发出"请求"信号, 从设备发出"回答"信号
根据"请求"和"回答"信号的撤销是否互锁, 又分为(速度依次变慢, 可靠性依次提升):
- 不互锁方式
- 主设备请求后, 不等回答; 一段时间后, 撤销请求信号
- 从设备收到请求后, 发出回答; 一段时间后, 撤销回答信号
- 半互锁方式
- 主设备请求后, 等到回答后, 才能撤销请求信号
- 从设备收到请求后, 发出回答; 一段时间后, 撤销回答信号
- 全互锁方式
- 主设备请求后, 等到回答后, 才能撤销请求信号
- 从设备收到请求后, 发出回答; 收到撤销请求后, 才能撤销回答
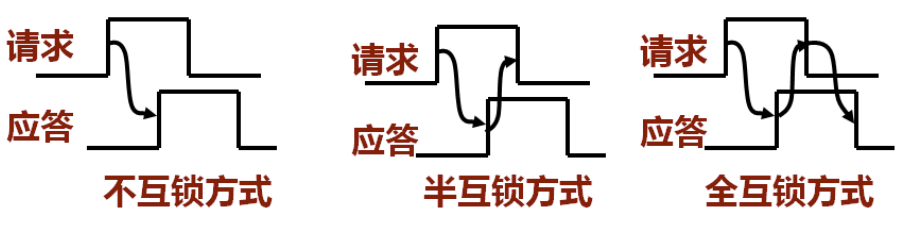
需要总线周期长度可变, 可以保证速度相差较大的部件可靠地进行信息交换
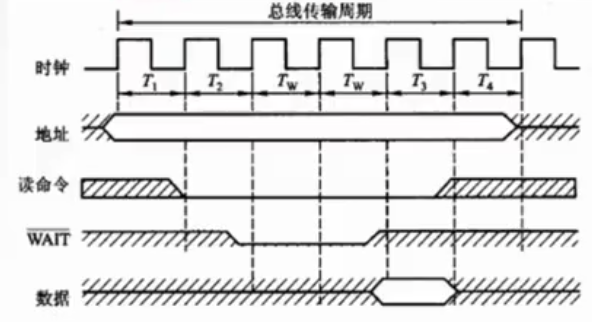
半同步通信 #
在统一时钟的基础上, 增加一个等待信号
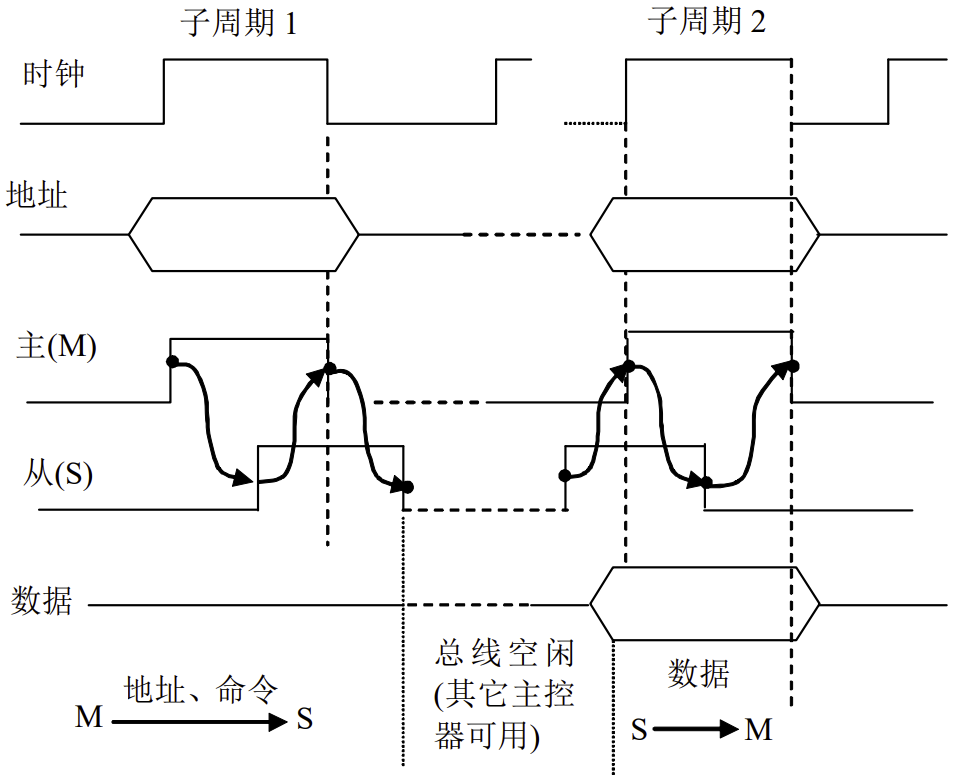
分离式通信 #
可以观察到之前的通信方式共同点:
- 主模块发地址和命令 - 使用总线
- 从模块准备数据 - 不使用总线
- 从模块向主模块发数据 - 使用总线
为了利用第二阶段, 分离式通信将一个总线周期分为两个子周期:
- 主模块申请占用总线, 使用完后立即放弃总线的使用权
- 从模块准备好数据后, 申请占用总线(需要改造), 将信息传送到总线上
6.4 总线标准 #
了解即可
涉及哪些方面:
- 并行/串行
- 几根数据线? 几根地址线? 是否复用
- 总线仲裁方式
- 总线定时方式
- 总线工作频率
- 电气特性…
各厂商协商好后, 从而发起制定标准
根据总线在计算机中的位置, 可分为:
- 系统总线:与 CPU 直连, 如 CPU 与北桥芯片, CPU 与主存
- ISA 并行总线, 1984提出
- EISA 并行总线, 1988提出, ISA 基础上增加位宽
- 局部总线: 通常由(高速)北桥芯片控制, 连接重要的(高速)硬件, 如显卡
- VESA 并行总线
- PCI 并行总线
- AGP 并行总线, PCI 扩展专门用于显卡
- PCI-E - (2001提出)现行使用统一总线标准, PCI 升级而来, 连接显卡, 网卡等
- 点对点串行传输
- 设备/通信总线: 通常由(低速)南桥芯片控制, 连接 IO 与外部计算机设备
- RS-232C 串行
- SCSI 并行
- PCMCIA 并行
- USB - 连接外部设备的通用串行总线
- 可供电, 根据压差来确定 bit 数据, 差模信号抗干扰能力强, 可高频率运行
- IDE - 并行总线, 硬盘/光驱接口
- SATA - 串行高级技术附件, 硬盘接口规范
串行逐渐替代并行的原因:
并行总线:
- m 根线传输 m 个比特, 高低电平表示1/0, 定时同步
- 线间干扰导致频率不能太高
- 各条线不能有长度差, 工艺难度大
串行总线: - 两根线每次传送1个比特, 差模信号表示1/0, 异步定时
- 频率较高
- 基于包传输(如xx比特为一个包), 可以多个数据通路分别串行传输多个包(如PCIE x 4/8)
7. 输入输出系统 - I/O #
操作系统IO部分更多注重软件, 机组内侧重硬件
7.1 基本概念 #
I/O 系统组成:
- I/O 软件 - 驱动/用户程序等, 通常采用 I/O 指令和通道指令实现信息交换
- I/O 指令格式: 操作码(CPU命令接口) + 命令码(接口命令设备) + 设备码
- I/O 硬件 - 外部设备, 设备控制器和接口, I/O 总线等
7.1.1 I/O 控制方式 #
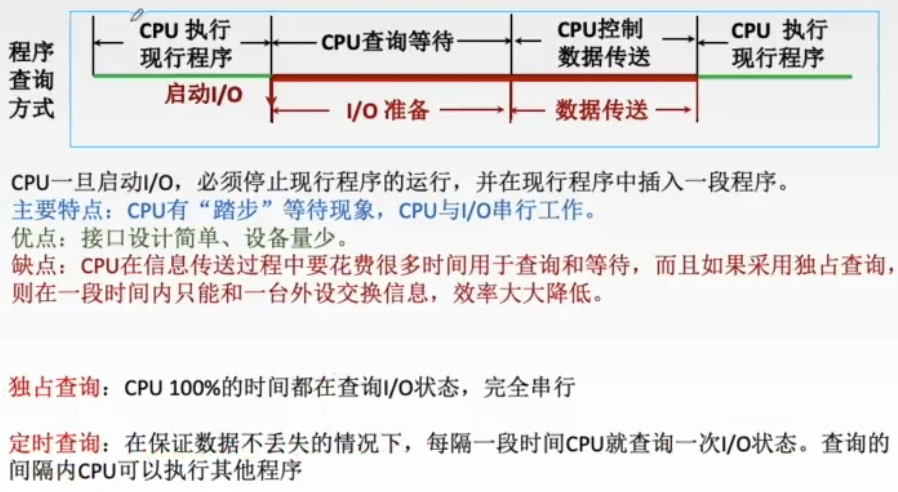
- 程序查询 - CPU 轮询检查 I/O 接口内的状态寄存器, 根据状态交互
- 程序中断 - I/O 设备就绪时向 CPU 发起中断请求, CPU 响应后继续交互
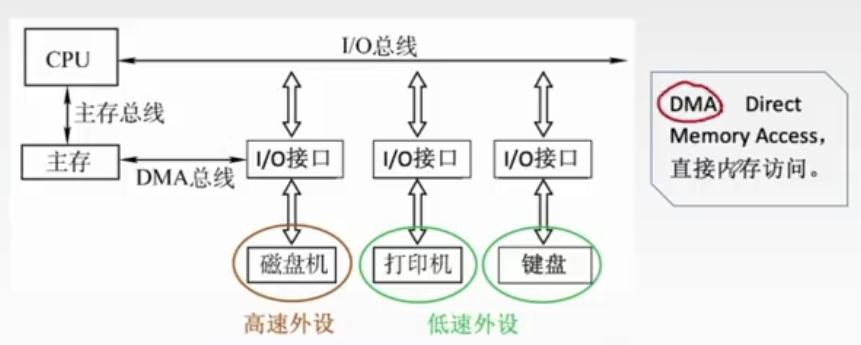
- DMA - 主存和 I/O 设备直连
- 通道方式 - 类似南北桥, 每个通道外挂若干设备, I/O 由通道执行
1,2 适用于慢速设备(避免频繁检查/中断); 3,4 适用于快速设备
参考三总线结构
{kind=link}
7.1.2 外部设备 #
输入设备 #
输入设备: 键盘, 鼠标
输出设备 #
输出设备: 显示器, 打印机
显示器主要参数:
- 屏幕大小: 对角线长度
- 分辨率: 横/纵像素乘积
- 灰度级: 黑白显示器能显示像素点的亮暗差别; 彩色显示器则表现为颜色的不同
- 刷新频率: 光点只能保持极短的时间消失, 必须定时重新扫描显示
- 显示存储器VRAM - 显存(重点)
- 为了提高刷新图像的"信号?", 将一帧图像(最小容量)储存在刷新存储器中
- VRAM 容量 = 分辨率 * 灰度级位数
- VRAM 带宽 = 分辨率 * 灰度级位数 * 帧率
- 现代计算机中(不考仅扩展)
- 显存除了保存当前显示帧的缓存, 还会用于保存即将渲染的图像数据(不考虑GPU)
- 集成显卡划分一片内存作为显存, 独立显卡有独立的显存
显示器类型:
- CRT 阴极射线管显示器
- LCD
- LED
- OLED
外存储器 #
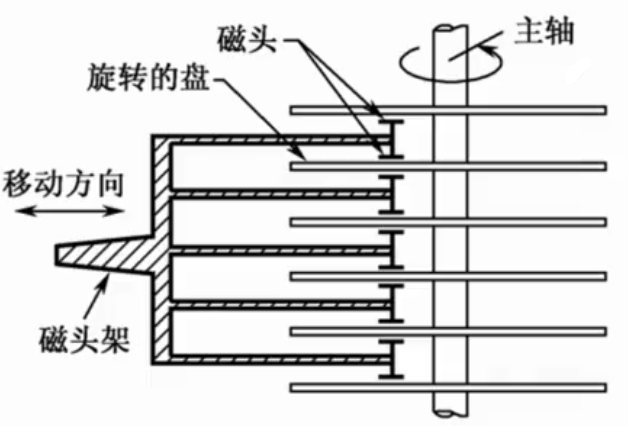
磁盘设备的组成 #
- 存储区域 - 一块硬盘多个盘面, 每个盘面多个磁道, 每个磁道多个扇区(最小单位)
- 磁头数 - 通常一个盘面对应一个磁头
- 柱面数 - 相同的磁道组成了柱面, 磁道数即柱面数
- 扇区数
- 硬盘存储区 - 有磁盘驱动器, 磁盘控制器和盘片组成
- 磁盘驱动器
- 磁盘控制器 - 接口, 如 IDE, SATA
现代磁盘大多是双面存储的, 示意图:
磁盘的性能指标 #
- 容量: 非格式化容量 < 格式化容量
- 记录密度
- 道密度 - 沿磁盘半径方向上, 单位长度的磁道数, xx道/cm
- 位密度 - 磁道单位长度上能记录的二进制信息量, 600bit/cm
- 所有磁道记录的信息量相等, 因此越靠内位密度越高
- 面密度 = 道密度 * 位密度
- 平均存取时间(重点)
- 寻道时间(磁头移动到目的磁道)
- 旋转延迟时间(定位到所在扇区)
- 传输时间
- 数据传输率 - 单位时间向主机传送数据的字节数
- 假设磁盘转数 r(转/秒), 每条磁道容量 N 个字节
- 数据传输率 = r * N
磁盘地址 #
依次为:
- 驱动器号 - 一台电脑可能有多个硬盘
- 柱面(磁道)号 - 移动磁头臂寻道
- 盘面号 - 激活某个磁头
- 扇区号 - 旋转将特定扇区划过磁头
磁盘阵列 RAID #
分类如下(越往后可靠性越高):
- RAID0 - 无冗余和无校验的磁盘阵列
- 类似低位交叉编址扩展
- RAID1 - 镜像磁盘阵列
- 双备份, 空间利用率减半
- RAID2 - 采用纠错的海明码的磁盘阵列
- 逻辑上连续的 bit 物理上分散存储在各个盘中
- 4bit信息位 + 3bit海明校验位, 可纠正一位错
- RAID3 - 位交叉奇偶校验的磁盘阵列
- RAID4 - 块交叉奇偶校验的磁盘阵列
- RAID5 - 无独立校验的奇偶校验的磁盘阵列
7.2 I/O 接口(I/O控制器) #
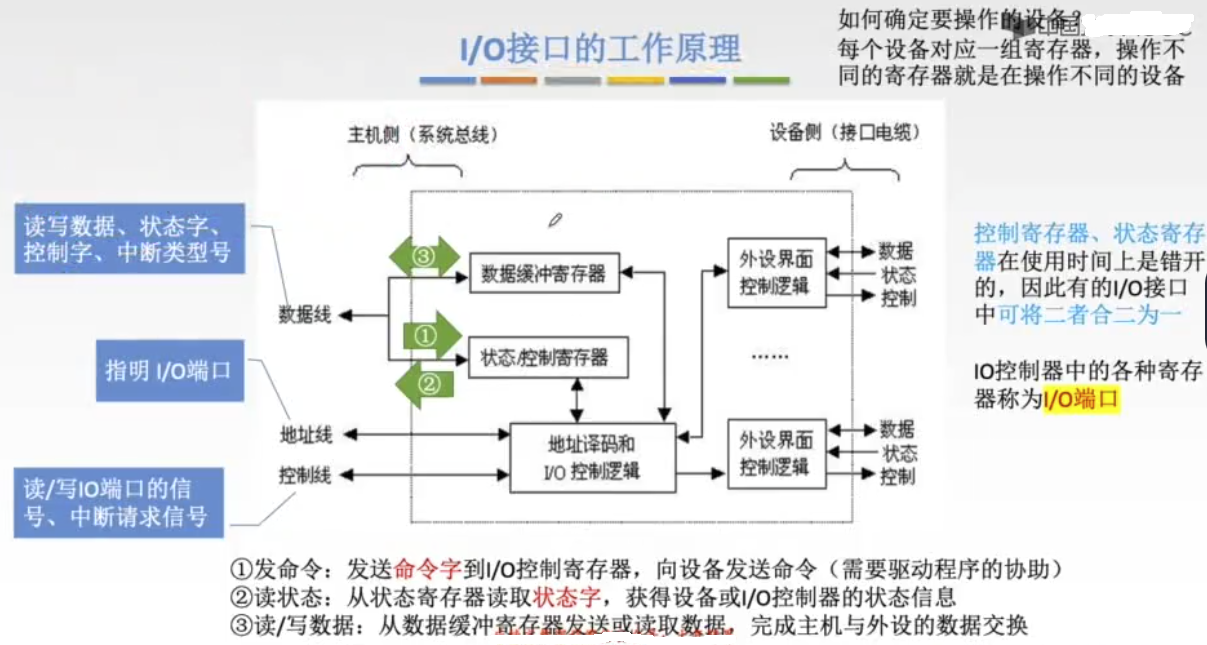
7.2.1 功能和基本结构 #
功能:
- 实现主机和外设的通信联络控制
- 地址译码和设备选择
- 数据缓冲
- 信号格式的转换 - 串/并转换, 模/数转换等
- 传送控制命令和状态信息 - 例如接受外部设备"准备就绪"的状态至状态寄存器
基本结构(注意状态/控制共用一个寄存器):
7.2.2 端口及其编址 #
编址方式:
- 统一编址(存储器映射)
- 无需 I/O 指令, 统一访存指令就可以访问 I/O 端口
- I/O 地址占用主存编址空间, 使可用内存容量变少
- 地址译码速度变慢
- 独立编址
- 使用专用 I/O 指令, 需要 CPU 增加额外控制信号
- 不占用主存空间
- I/O 端口地址位数少, 译码快
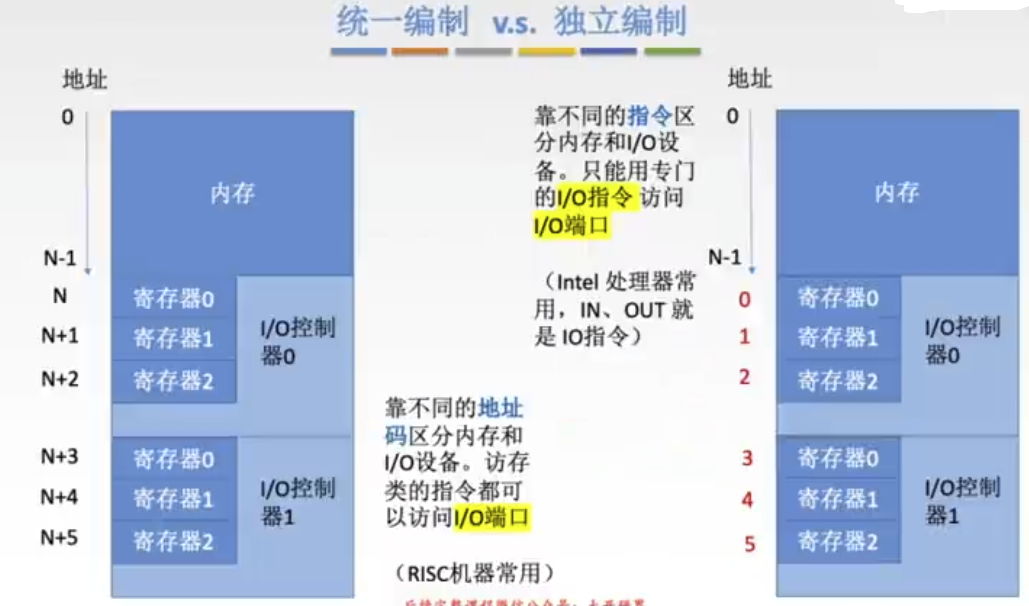
统一编制(存储器映射方式):
7.3 I/O 方式(重点) #
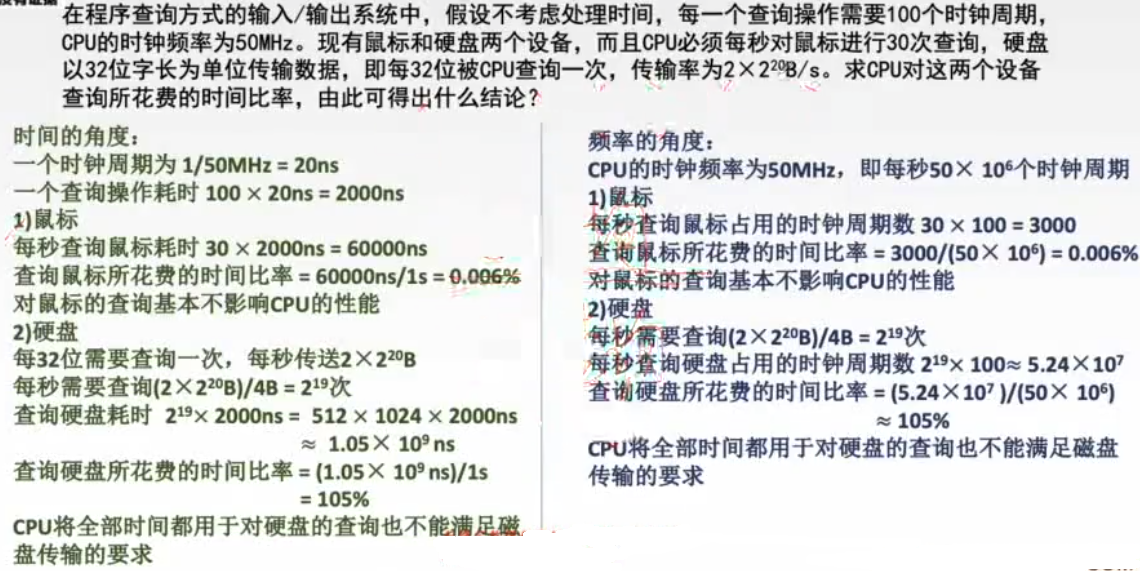
7.3.1 程序查询方式 #
例题:
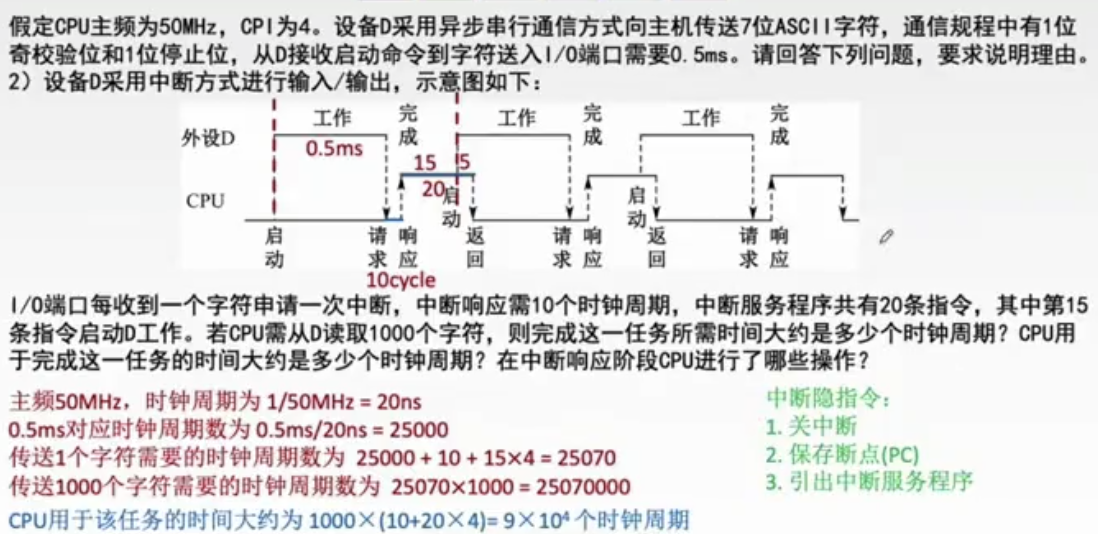
7.3.2 程序中断方式(重点) #
中断和函数调用的区别: 函数调用仍然归属于当前进程, 中断后控制器转移给别的进程
中断分类 #
本章讨论的均为 I/O 设备的外设请求中断, 即可屏蔽的中断
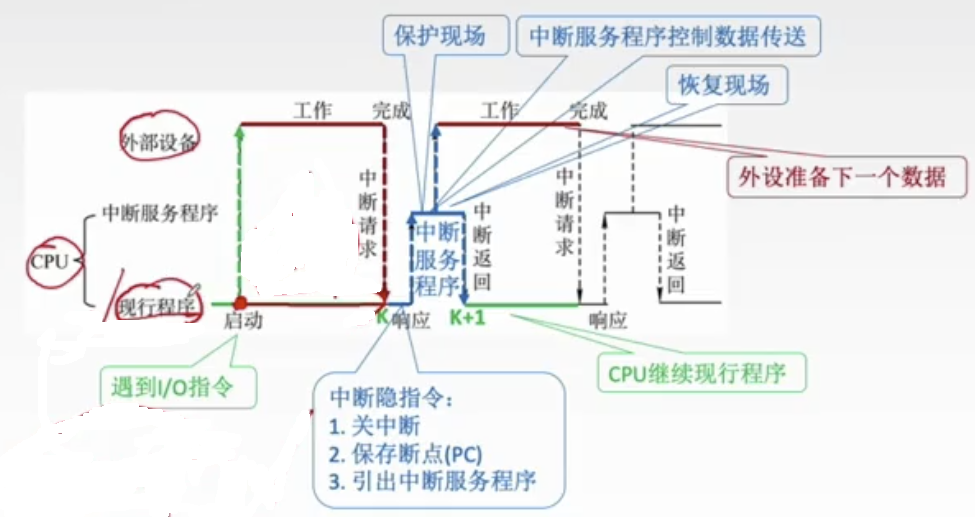
程序中断工作流程(重点) #
- 中断请求
- 每个中断源设置中断请求标记触发器 INTR, 其发出的属于可屏蔽中断
- NMI 信号发出的是不可屏蔽中断, 优先级最高
- 中断判优
- 硬件实现 - 硬件排队器(例如高优先级位高电平会通过非门给其它位一个0信号)
- 软件实现 - 根据优先级按位检查
- 中断响应
- 执行中断隐指令 - 硬件实现, 非指令系统中真正的指令
- 关中断
- 保存断点(PC值存入堆栈), 以便后续中断结束返回继续执行
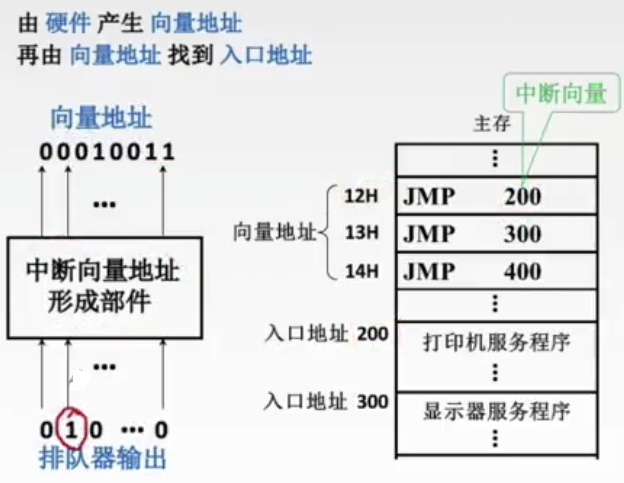
- 引出终端服务程序, 取出中断服务程序入口地址并存入 PC, 如何确定地址?:
- 软件查询法
- 硬件向量法
- 根据排队器输出的信号生成向量地址(中断类型号)
- 根据终端类型号去中断向量表查表, 得到中断程序入口地址的指针
-
- 执行中断隐指令 - 硬件实现, 非指令系统中真正的指令
- 中断处理过程(各计算机实现不同, 这里可能由隐指令完成的过程也整体列出)
- 保护现场
- 关中断
- 保存断点(各变量, 如保存 ACC 中值)
- 中断服务(设备服务)
- 恢复现场
- 中断返回
- 保护现场
多重中断 #
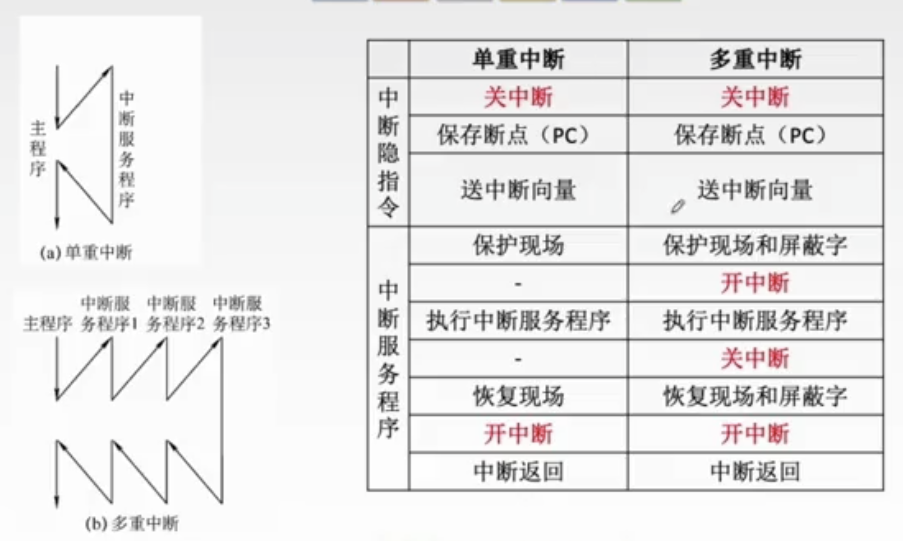
要实现多重中断, CPU 需要支持优先级高的中断源有权中断优先级低的中断源
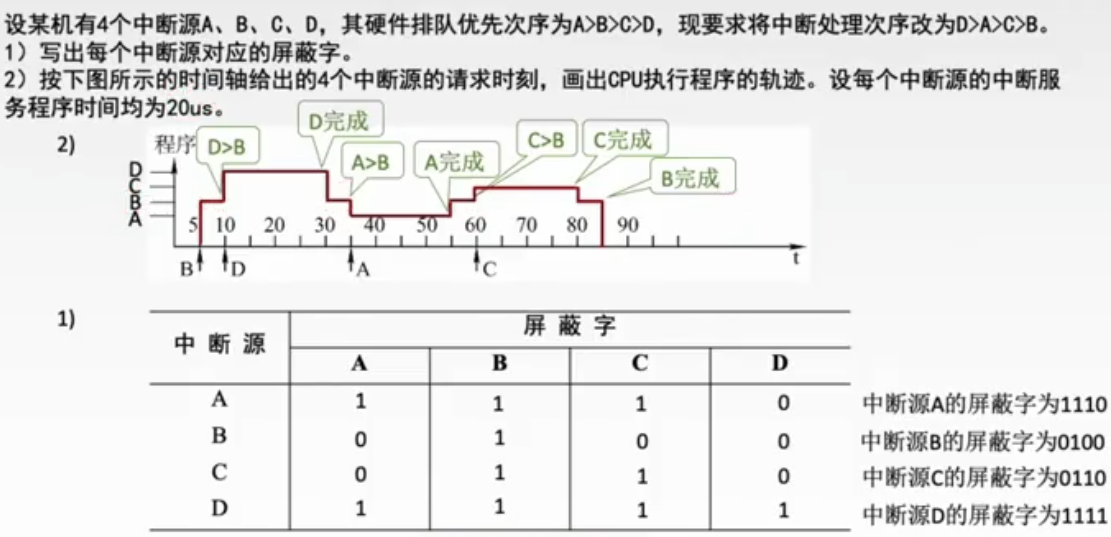
因此需要实现中断屏蔽技术:
- 每个中断源都有一个屏蔽触发器, 1表示屏蔽中断请求
- 所有触发器组合在一起称为屏蔽字寄存器
- 每个中断源对应一个屏蔽字, 处理该中断时, 屏蔽寄存器中内容为对应的中断字
- 屏蔽字 1 越多即优先级越高(至少要能屏蔽自身的中断, 因此至少有一个1)
例题:
CPU占用 #
CPU占用流程图:
例题:
7.3.3 DMA 方式 #
通常用来控制块(以块为单位读写)设备, 如磁盘
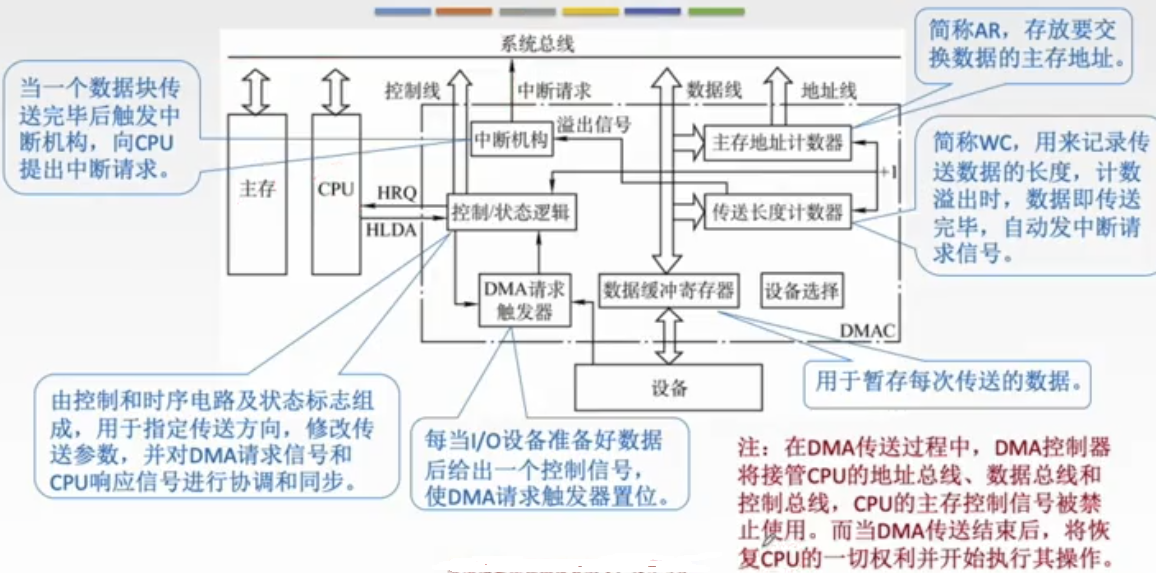
DMA 结构 #
DMA 简要流程和建议结构:
DMA 结构图:
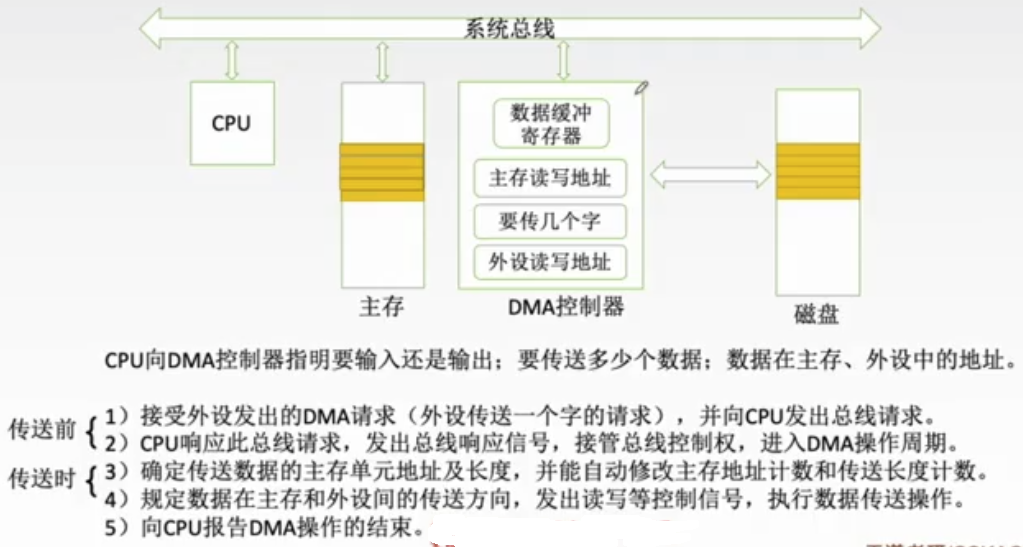
DMA 传送过程(重点) #
- 预处理
- CPU 向 DMA 控制器指明接下来要读写的数据存放在主存中的起始地址 => AR
- 指明设备的读写地址 => DAR
- 指明要传送多少数据 => WC
- 启动 I/O 设备
- 数据传送
- 以读取外设数据为例, 设备将数据写入数据缓冲寄存器 => DR
- 写满后向 DMA 控制器请求发送 DMA 请求
- DMA 申请总线控制权 => HRQ, CPU 统一申请则返回信号 => HLDA
- DMA 将数据 => 总线 => 主存
- 此阶段完全由 DMA 控制, CPU 可继续执行任务
- 后处理
- 中断服务程序(如传送长度计数器WC将要溢出, 说明已经缓冲了一个块的数据需要写入一次)
- DMA 结束处理
- 继续执行主程序
DMA 传送方式 #
数据传送阶段 DMA 需要申请总线控制权以读写主存, CPU 此时可能也在使用
此时分三种方式使用主存:
- 停止 CPU 访问 - 不利于 CPU 利用率
- 交替访存
- 将 CPU 周期分为两个子周期, 交替访问主存
- 适用 CPU 工作周期比主存周期长的情况
- 周期挪用(周期窃取)
- 如果 CPU 正在访存, 则需等待 CPU 存取结束后, 再让出总线控制权
- 如果两者同时申请, 则 DMA 优先获取控制权(避免数据缓冲寄存器满后数据丢失)
DMA 与中断的比较 #
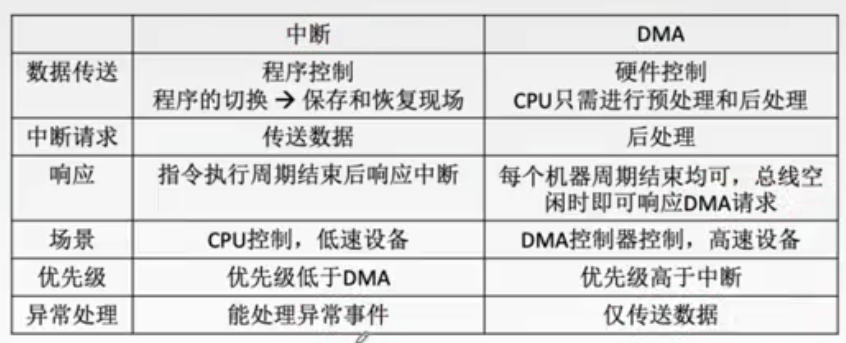
- IO 系统基本概念
- I/O 控制方式
- 外部设备
- 输入设备
- 输出设备
- 外部存储器
- IO 接口
- 基本结构
- 编址
- 统一编址
- 独立编址
- IO方式(可能出综合题)
- 程序查询方式
- 工作流程
- 计算例题
2.程序中断方式(可能考大题) - 中断的分类
- 中断的硬件向量
- 中断的处理过程
- 单中断与多中断
- 中断屏蔽技术
- DMA 方式
- DMA 的结构
- DMA 的工作过程
- DMA 的特点
- DMA 与中断的比较
- 程序查询方式